SEG
MIT’s Origami Inspired Segway Robot

1) High-Level Description
Aiming for a $10 total cost, this robot was designed on the idea of foldable robots, where the 3D robot is made from 2D material - polyester, in this case- which is folded like in the Japanese art of Origami and then is equipped with actuation mechanisms and some electronics.
This AFRON Robot consists of a pair of folded wheels connected to servos on the chassis and supplied with control electronics that uses an IR sensor to navigate the robot and avoid obstacles in its path. It also includes a counterweight. The robot was developed for the traditional category, so that users can reprogram it off-board.
For the purpose of the challenge, this robot is to be assembled by the user from a kit which includes the plastic template cutouts for the wheel and the chassis, the servo with its servo horns and screws, and the circuitry and the counterweight.
The navigation was coded using AVR Studio (can be
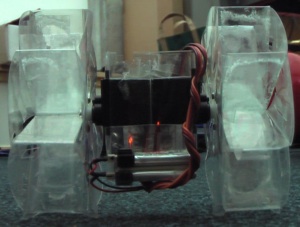
Picture of SEG
download from http://www.atmel.com/microsite/atmel_studio6/ ) and uploaded using a programmer header onto the micro-controller. The programmer header can be shared by multiple robots
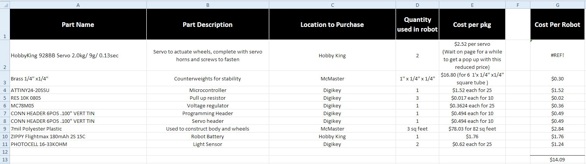
In the end, the total cost for materials/components used/assembled was $14.09
-
2)Educational applications and possible resources
Our vision is to enable quantum leaps in the way young students learn about robotics by developing origami-inspired robot technologies to rapidly, inexpensively and easily produce functional robots to match high-level specifications. Our AFRON $10 robot has been produced using the foldable robot principles and has the potential to provide every child in the classroom with hands-on experimentation devices.
It is never too early to introduce students to robotics. Inspired by courses that use Lego Mindstorms as platform, by the huge success of the First competition, and by the interest and enthusiasm of many local robotics clubs, our AFRON robot entry can be used as a platform to introduce young students to reactive control of robots and finite state machines. We imagine building a curriculum that uses our AFRON robot entry to implement a reactive navigation system to follow a line, and a finite state machine for a simple scavenger hunt.

-
5)Relevant Drawings
In the case of our foldable robots, this includes both the CADed images and the templates from which the chassis and the wheels were folded.
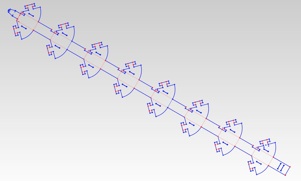
Above: The 2D template for the wheel to be
inputted into the laser cutter
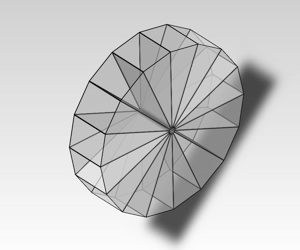
Right: 3D SolidWorks model of the wheel once it
has been folded.
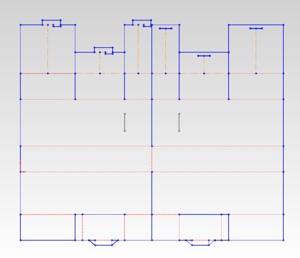
The 2D template for the chassis of the robot to be inputted into the laser cutter.
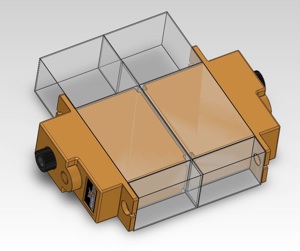
3D SolidWorks model of the chassis holding the servo.
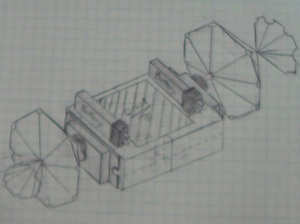
Initial concept drawing for the robot.
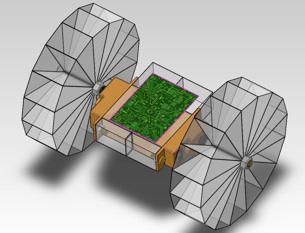
Final SolidWorks model of the robot.
6) Step by Step Instructions.
There are four overall steps to assembling the robot.
i. First is to fold the 3D wheels and chassis from the template cutouts supplied in the kit. This is done by folding along the perforations in the cutouts and inserting tabs in slots according to the pictures below.
ii. Slide in the servos into their holds in the chassis and connect the battery and the programmed circuitry , and the counterweight onto the chassis.
iii. Slide a servo horn into the fit on each wheel (The pocket for the servo horn is on the side of the wheel with flaps the flip upward for an easier insertion). Secure the horn in place using screws.
iv. To bring it all together, screw in the secured servo horns to servos on the the now-assembled chassis.
More details can be gathered from the posted videos
8) Software
As mentioned before, our navigation code was programmed using AVR Studio
-
10)Pictures
The following is a photo gallery of SEG in action!
7) Experiments
We conducted experiments to test our IR sensors that the robot would use to interact with the environment. The video below sums up our test results.
-
-Laser Cutter to cut the templates
-
-Bandsaw to cut the brass weight
-
-Small Philips Screwdriver
-
-Soldering Iron
-
-Solder
-
-Scissors
-
-Tweezers



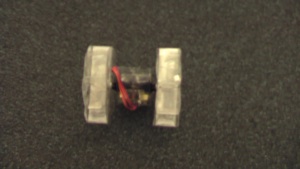

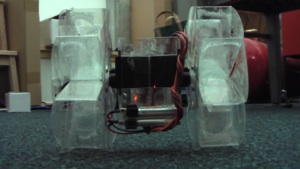
SEG is demonstrating its locomotion capabilities (fast acceleration, zero turning radius) in a preprogrammed sequence:
SEG obstacle avoidance test #1:
SEG obstacle avoidance test #2: