Demos: Robot Manipulation
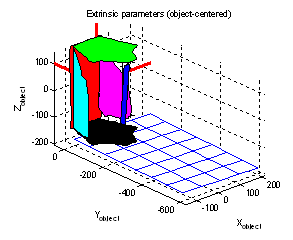
Input
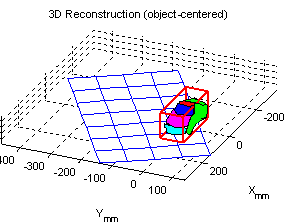
3D Reconstruction
Grasp
media player
<
media player
<