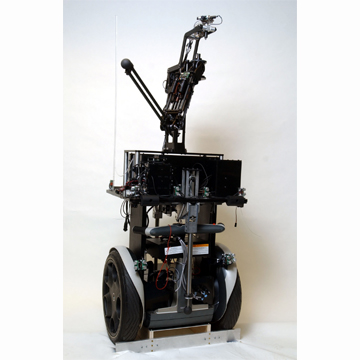
Cardea is a Segway RMP with a force controlled arm mounted on it. The platform was designed to explore mobile manipulation in human-centric environments. Jeff Weber and I developed a cable-drive brushless Series Elastic Actuator arm with 3 DOF for this robot.
The arm is controlled by a custom DSP board and a Stack embedded controller running the Creal behavior language developed by Prof. Rod Brooks. We designed and built the arm, power and control electronics, and manipulation behaviors over the course of one very busy summer.
Cardea has a set of sonar sensors, bump sensors, and two Firewire cameras. One cameras scanns for doorways while the other points at the ground and manages corridor navigation. Paul Fitzpatrick and Charlie Kemp developed Cardea's visual system.
Cardea is no longer an active project.
Brooks et al. "Sensing and Manipulating Built-for-Human Environments", International Journal of Humanoid Robotics, Vol 1, No. 1, 2004. [PDF]
 |
|
 |

The New York Times did a photo shoot with Jeff Weber [left], Cardea, and myself.
Videos.
![]() Demonstration of the RMP dynamic balancing and deployable kickstands.
Demonstration of the RMP dynamic balancing and deployable kickstands.
![]() Cardea successfully finds a door, pushes it open, and goes through it.
Cardea successfully finds a door, pushes it open, and goes through it.
