up next
I - General Notions
of Topology
I.A
- A Continuous Theory
Topology is a branch of mathematics that studies the properties of
geometric figures that are preserved through deformations, twistings
and stretchings, without regard to size and absolute position. In
topology, the important mathematical notions are those of continuity and of continuous
transformations; tearing, which would generate discontinuities,
is prohibited.
Topology studies the properties of spatial objects by abstracting their
inherent connectivity while ignoring their detailed form. One of the
central ideas is that geometric objects, such as circles, curves,
surfaces, can be treated as objects in their own right, independently
of how they are represented or how they are embedded in space.
The
exact geometry of the objects, their location and the details of their
shape are irrelevant to the study of their topological
properties. In
essence, this amounts to characterizing the topology of an object by
its number of disconnected components, holes and cavities, but not by
their position. For instance, a circle is topologically equivalent to
any closed loop, no matter how different these two curves may appear.
Similarly, the surface of a coffee mug with a handle is topologically
the same as the surface of a doughnut (this type of surface is called a
one-handled torus).
However, by ignoring the embedding space, it then becomes impossible to
distinguish a torus from a knotted torus (see Figure below). This has
lead mathematicians to define several levels of topological equivalence
depending on the chosen set of continuous transformations. Given a
specific set of transformations, two geometric figures represent the
same topological object, or the same equivalence class, if both of them
can be deformed into a third one by using continuous transformations
from the considered set only.
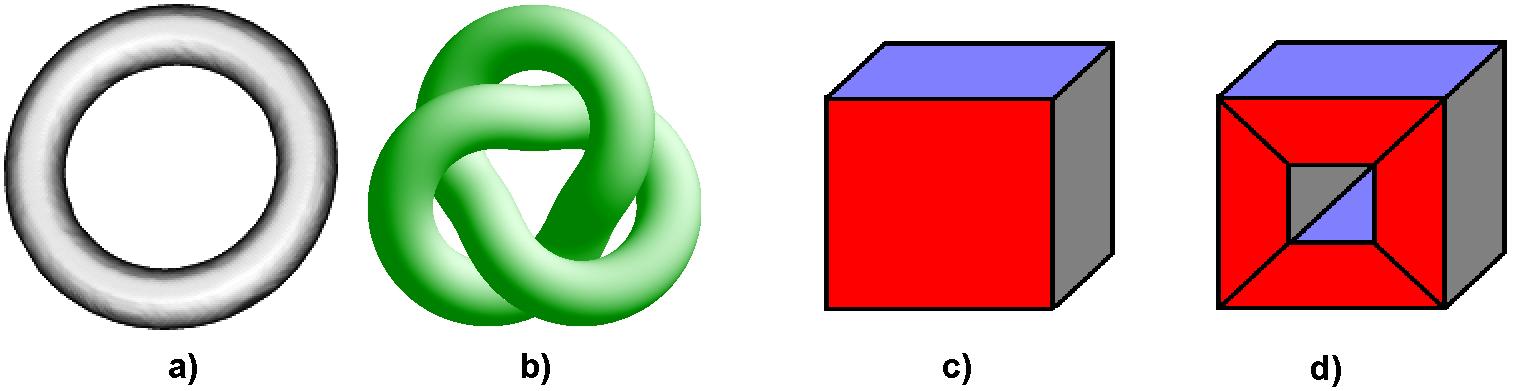
Intrinsic topology, homotopy type and
Euler-characteristic.a-b)
Two toruses that are homeomorphically equivalent. They share the same
intrinsic topology. However, they do not share the same homotopy type
as one can not be continuously transformed into the other. c) A
geometric object with a spherical topology; its Euler-characteristic is
X=v-e+f=8-12+6=2. d) A geometric object with a toroidal topology and an
Euler-characteristic of X=v-e+f=16-32+16=0.
1.B -
Notions of Topological Equivalence
In this work, we are interested in locating anatomical structures from
medical images. These structures are geometric entities, which are
often referred to as topological spaces in the mathematics community.
These shapes can be represented equivalently as surfaces or as volumes.
Depending on the context, a topological space X
might refer to the volume or surface representation. Using these two
dual representations, two distinct levels of topological equivalence
are usually considered. But we first need to introduce some
mathematical definitions.
Homeomorphism
An homeomorphism M from a space X into a space Y is a continuous,
one-to-one transformation with a continuous inverse M^{-1}.
Homeomorphisms have some important properties that we will use later in
this dissertation (particularly in Chapter~\ref{chap:genetic}). The
Jacobian J_{\mathscr M}=|\frac{\partial \mathscr M}{\partial \mathbf
x}|$ of the transformation\footnote{The fact that the Jacobian exists
might seem confusing at first. Indeed, we have only assumed that the
mapping $\mathscr M$ was an homeomorphism, and we did not specify that
the mapping $\mathscr M$ was differentiable. However, in dimension 1,
2, and 3, any pair of homeomorphic smooth manifolds are diffeomorphic!
This surprising property does not hold in higher dimension.} is
non-singular (i.e. strictly positive or strictly negative). This is, of
course, the multidimensional analog of monoticity. Another important
property of the Jacobian is the fact that it relates the
$n$-dimensional volumes of $X$ and $Y$: $d^n\mathbf y=J_{\mathscr
M}d^n\mathbf x$, where $\mathbf y=J(\mathbf x)$.
\begin{definition}{\bf Homotopy}\\
An homotopy is a continuous transformation from one function into
another. An homotopy between two functions $f$ and $g$ from a space $X$
into a space $Y$ is a continuous map $G:X\times [0,1]\to Y$ with
$G(\mathbf x,0)=f(\mathbf x)$ and $G(\mathbf x,1)=g(\mathbf x)$, where
$\times$ denotes set pairings. One says that two maps $f_0$ and
$f_1$
are homotopic if there exists a homotopy connecting them, and one
writes $f_0\simeq f_1$.
\end{definition}
In simpler terms, two objects are said to be homotopic if one can be
continuously deformed into the other. For instance, a line segment is
homotopic to a point, and a circle is homotopic to a solid torus. We
note that, contrary to homeomorphism, homotopy does not consider the
dimension of the topological objects. For instance, the unit ball in
$\mathbb R^n$, $\{ \mathbf x\in \mathbb R^n /\ \| \mathbf x\|
\leq 1
\}$, is homotopy equivalent to the point $\{\mathbf x=0\}$. Other
levels of topological equivalence can be defined by considering the
dimensionality of the topological objects. Homotopy is one of the main
concepts of Algebraic Topology. For more details on homotopies and
algebraic topology, we refer the reader to an excellent book on
algebraic topology~\cite{hatcher:02}. \\
Using these two set of continuous transformations, two levels of
topological equivalence are usually considered:
\begin{itemize}
\item{
\emph{Intrinsic Topology} : the intrinsic topology of an object
is
defined by the set of properties that are preserved by
\emph{homeomorphic} transformations defined on the surface of the
considered object. Under this set of equivalence, the embedding space
is ignored : a knotted solid torus has the same intrinsic topology as a
simple torus; and a hollow sphere is of the same topology as two
spheres.
}
\item{
\emph{Homotopy type} : the homotopy type of an object is the set
of
properties that are preserved by \emph{homotopic} transformations.
Formally, we define two spaces $X$ and $Y$ to share the same homotopy
type, or to be homotopy equivalent, if there are maps $f:X\to Y$ and
$g:Y\to X$, such that the composition $f\circ g$ is homotopic to the
identity map of $Y$ ($f\circ g\simeq \mathbb I_Y$), and the composition
$g\circ f$ is homotopic to the identity map of $X$ ($g\circ f\simeq
\mathbb I_X$). Homotopy, which was first formulated by
Poincarr\'e
around 1900, provides a measure of an object's topology by considering
the embedding space. At this level of topological equivalence, a
torus
is topologically different from a knotted torus, since one cannot be
continuously transformed into the other (see
Fig.~\ref{fig:topology}-a,b).
}
\end{itemize}
In this dissertation, the required level of topological equivalence is
provided by homotopy. The anatomical structures to be segmented define
smooth 2D compact (i.e. closed) orientable manifolds\footnote{A
manifold is a topological space such that each of its points has a
neighborhood that is homeomorphic to an open planar disk.}
embedded in
the real 3D Euclidean space. For such ``simple'' surfaces, the study of
their differential properties provides deep insights about their
topology, as the topology of such surfaces have profound
connections
with differential geometry.
1.C -
Topology and Differential Geometry
Differential geometry is the study of Riemannian manifolds.
Differential geometry, which deals with metricable notions on
manifolds, has some surprising and fundamental links with topology. The
connections arise from a set of theorems of elementary geometry (we
refer the reader to the book on elementary differential geometry
of
O'Neill for a proof of these theorems~\cite{oneill:97}). We first
introduce a few notations and definitions.
\begin{definition}{\bf Rectangle and 2-segment}\\
A rectangle $R$ is a region of the 2D plane $R:a\leq u \leq b\ ,\ c\leq
v
\leq d$, with $(u,v)\in \mathbb R^2$. The interior $R^\circ $ of
the
rectangle $R$ is the open set $a< u < b\ ,\ c< v< d$.
A 2-segment is a transformation from a rectangle $R$ into $\mathbb R^3$
that is a one-to-one regular mapping from the interior $R^\circ $ of
the rectangle $R$ into $\mathbb R^3$.
\end{definition}
\begin{definition}{\bf Rectangular decomposition of a surface
$\mathscr{C}$}\\
A rectangular decomposition of a surface $\mathscr{C}$ is a finite
collection of one-to-one 2-segments whose images cover $\mathscr{C}$ in
such a way that if any two intersect, they do so in either a single
common vertex or single common edge.
\end{definition}
\begin{theorem}{\bf Rectangular decomposition}\\
Every compact surface $\mathscr{C}$ has a rectangular decomposition
$\mathscr{D}(\mathscr{C})$. \end{theorem}
\begin{theorem}{\bf Euler-characteristic of a rectangular
decomposition}\\
\label{thm:eulercharacteristic}
If $\mathscr{D}(\mathscr{C})$ is a rectangular decomposition of a
compact surface $\mathscr{C}$, let $v$, $e$, and $f$ be the number of
vertices, edges, and faces in $\mathscr{D}(\mathscr{C})$. Then
the
integer ($v-e+f$) is the same for every rectangular decomposition of
$\mathscr{C}$. This integer $\chi (\mathscr{C})$ is called the
Euler-characteristic of $\mathscr{C}$.
\end{theorem}
The fact that a rectangular decomposition is used to compute the
Euler-characteristic of the surface is merely a convenience for the
proof of the theorem. Arbitrary polygons could as well have been used
to decomposed $\mathscr{C}$. In the resulting polygonal decomposition,
the different polygons would still be required to fit neatly, but they
would not have the same number of sides. An arbitrary polygonal
decomposition is called a tessellation, while, when only triangles are
used, the decomposition is called a triangulation of $\mathscr{C}$.
\begin{theorem}{\bf Topological invariance of the
Euler-characteristic}\\
\label{thm:invariance}
{If $\mathscr{C_M}$ and $\mathscr{C_N}$ are two compact
orientable
surfaces, $\chi(\mathscr{C_M}) = \chi(\mathscr{C_N})$ if and only if
$\mathscr{C_M}$ and $\mathscr{C_N}$ are homeomorphic.}
\end{theorem}
%\begin{theorem}{\bf Gauss-Bonnet Theorem}\\
%\label{thm:gauss-bonnet}
%The total Gaussian curvature of a compact orientable geometric surface
$\mathscr{C}$ is $2\pi \chi(\mathscr{C})$.
%\end{theorem}
%The Gauss-Bonnet theorem relates the Euler-characteristic of a surface
to its total Gaussian curvature.
%The total Gaussian curvature of a compact orientable manifold is
completely
%determined by its Euler-characteristic. It does not depend on the
%local shape of the surface but only on the surface connectivity.
Thm.~\ref{thm:invariance} is of central importance. It states that
\emph{the Euler-characteristic of a surface is a topological
invariant}. Two surfaces that have the same Euler-characteristic
share
the same \emph{intrinsic} topology. However, we note that the
Euler-characteristic does not define the homotopy type of a surface,
since the embedding space is being ignored. Particularly, this implies
that a discrete representation of a surface using a polygonal
decomposition with the desired Euler-characteristic might be
self-intersecting in the 3D embedding space. We will discuss this
important point later. \\
The Euler-characteristic is of great practical interest because it can
be calculated from any polyhedral decomposition $\mathscr{D}$ of the
surface by $\chi = v - e + f$, where $v$, $e$ and $f$ denote
respectively the
number of vertices, edges and faces of the polyhedron
$\mathscr{D}$.
The Euler-characteristic of a sphere $\mathscr{S}$ is
$\chi(\mathscr{S})=2$ (see Fig.~\ref{fig:topology}-c). This implies
that any surface $\mathscr{C}$ with $\chi(\mathscr{C})=2$ is
topologically equivalent (i.e. homeomorphic) to a sphere and therefore
does not contain any handles. Surfaces with an Euler-characteristic
$\chi(\mathscr{C})\neq 2$ have a topology that is different from that
of a sphere. However, the Euler-characteristic does not provide any
information about the localization of the topological differences.
Also, Thm.~\ref{thm:eulercharacteristic} states that the way a
surface
is decomposed (i.e. tessellated) does not influence its topology. Any
polyhedral decomposition of a surface will encode for the same
intrinsic topology.\\
In fact, any compact, connected, and orientable surface is homeomorphic
to a sphere with some number of handles. This number of handles is a
topological invariant called the \emph{genus}. For example, a sphere is
of genus $0$ and a torus is of genus $1$. The genus $g$ is
directly
related to the Euler-characteristic $\chi$ by the formula
$\chi=2-2g$.
In the case of multiple surfaces involving $K$ connected
components,
the total genus is related to the total Euler-characteristic by the
formula: $\chi=2(K-g)$.
1.D -
On Topological Defects
We have already mentioned that an anatomical structure can be either
represented by a volumic representation or by a surface representation,
the two descriptions being dual representations. In this work, we call
a topological defect any deviation from the spherical topology. Since
we are considering 2D, smooth, orientable, and compact surfaces that
are embedded in the 3D Euclidean space, 3 types of topological defects
can be encountered:
\begin{itemize}
\item{Disconnected components: in the presence of image artifacts,
segmentations often contain several connected components, which might
either constitute parts of the same structure or erroneous pieces of a
segmentation. }
\item{Cavities: cavities could be either the result of unexpected
anatomical structures that are located inside the volume of interest,
such as tumors, or, most frequently, the result of of image artifacts.
Cavities are usually easy to detect and correct retrospectively if
interpreted as connected background components. }
\item{Handles or holes: a handle or hole in a volume or a surface is
identified whenever there exists a continuous loop that cannot be
homotopically deformed onto a point within the manifold itself. These
loops are called non-separating loops and constitute a fundamental
concept of algebraic topology~\cite{hatcher:02}. Particularly, these
are used to define the fundamental group of an
object~\cite{hatcher:02,mangin-etal:95}.
}
\end{itemize}
Finally, we note that for each defect present in an object (i.e. the
foreground object) there exists a corresponding
defect in the background: a disconnected foreground component can be
interpreted as a background cavity; a foreground cavity is a
disconnected background component; and a handle in a foreground
component defines another handle in the background component.
This foreground/background duality provides a methodology to
correct a
topological defect~\cite{kriegeskorte-goeble:01,han-xu-etal:01}
(i.e.
any deviation from the spherical topology). For instance, the
presence
of a handle in an object could be corrected by either cutting the
handle in the foreground object, or cutting the corresponding handle in
the background object. Cutting the background handle can be interpreted
as filling the corresponding hole. We will make use of this dual
representation in Chapter~\ref{chap:digital_topology}.
Topology in Medical Imaging
We know that most macroscopic structures of the brain have the topology
of a sphere. For instance, the highly folded cerebral cortex has the
simple spherical topology, which means that it can be smoothly unfolded
onto a sphere (
movie ).
Accurately locating (i.e. segmenting) specific structures from a
medical image (MRI, CT, ...) can be a challenging task. Segmenting
under topological constraints, i.e. achieving accurate location while
ensuring that the topology of the object is correct, becomes even more
difficult. However, it should be obvious that being able to achieve
accurate and topologically correct representation of different
structures is certainly of interest in medical imaging (Intersubject
Registration, Spherical Coordinate System, Shape Analysis,
Visualization...).
There are two ways of achieving accurate segmentation under topological
constrainsts for medical images. Topological constraints can be
directly incorporated into the segmentation process or retrospectively
applied
to an already segmented structure. Both approaches use the same
techniques, and we will now detail them.