

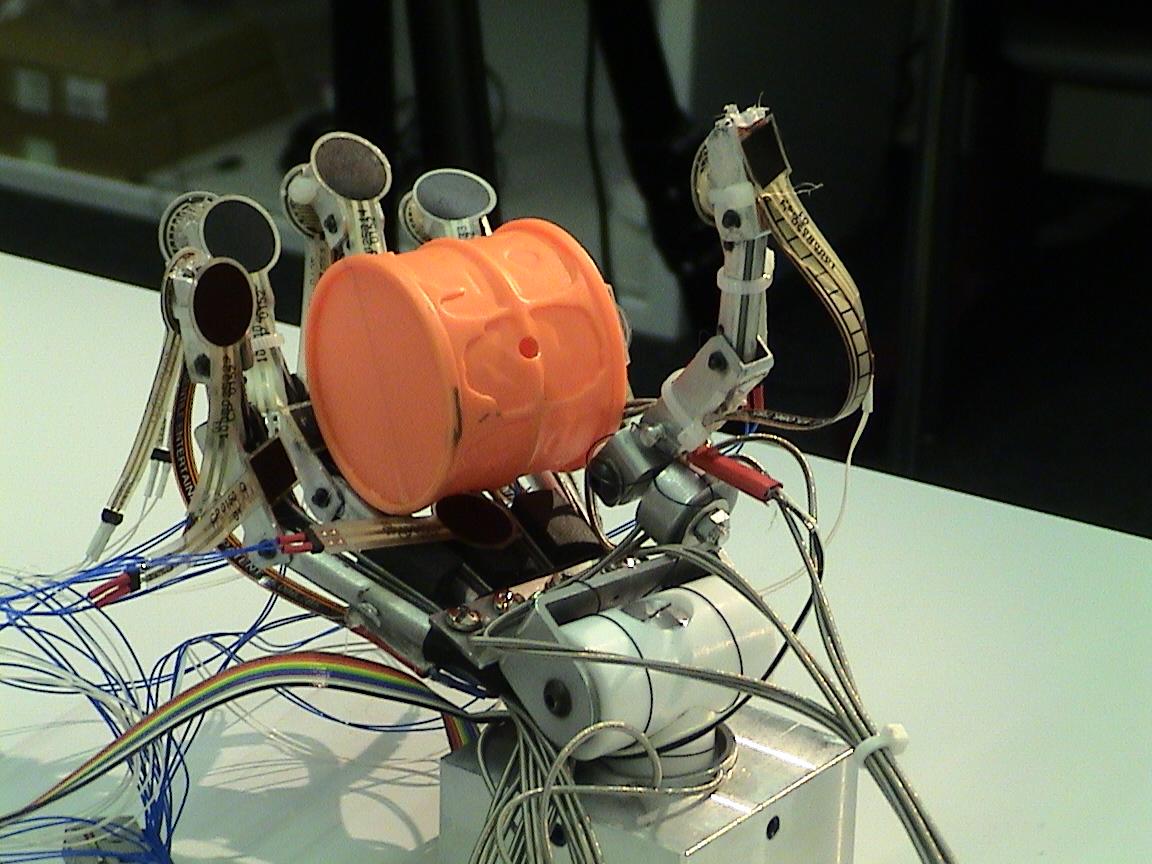
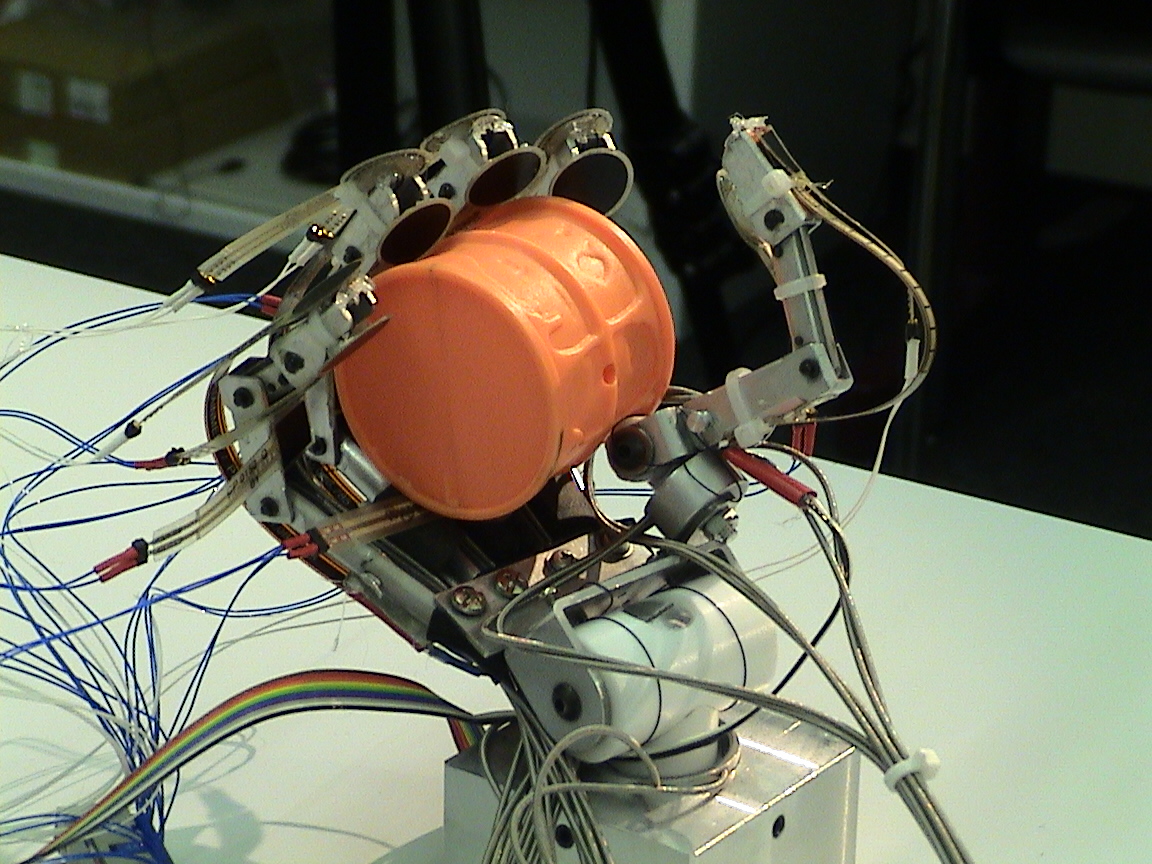
In collaboration with the Developmental Cognitive Machines Lab. at the University of Tokyo (Professor Hiroshi Yokoi), we have developed a prosthetic robotic hand inspired by the muscle tendon system of the human hand. The robotic hand has 13 degrees of freedom, and each finger has been equipped with different types of sensors (i.e., flex/bend, angle, and pressure).
At the Biomechatronics lab, medical system engineering department, at Chiba university (Prof. Wenwei Yu) in Japan, the same robotic hand has been used as a prosthetic device. EMG signals can be used to interface the robot hand non-invasively to a patient and electrical stimulation can be used as a substitute for tactile feedback.
At the Artificial Intelligence Lab, we use the robotic hand to investigate the relationship between morphology, intrinsic body dynamics, generation of information structure through sensorimotor coordinated activity, and learning. We have implemented biologically inspired learning mechanism to allow the robotic hand to explore its own movement capabilities. Moreover, by correlating the sensory input as a result of its motor outputs, the robotic hand can learn to manipulate and grasp objects by itself (Gomez et al., 2005; Gomez et al., 2006).
| Pictures | Videos |
|---|---|
| robotHand11.JPG | Robot hand grasping |
| robotHand12.JPG | Robot hand simulator (sinusoidal position control) |
| robotHand13.JPG | Exploring an object |
| robotHand14.JPG | Cheap grasping |
{kind=link}
{kind=link}
{kind=link}
{kind=link}