Here are some video clips from Aryan. The clips are sorted in chronological order, showing evolution of the robot over time.
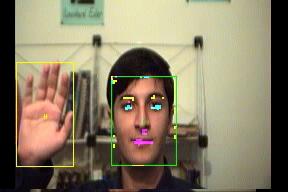
Computer vision algorithms for detecting and tracking face, facial features and hand. At this time the electro-mechanical platform is not ready yet. The program receives its input from a fixed camera and displays the result on the screen.


Now the above algorithm was used in conjunction with a pan/tilt neck for tracking actively tracking face or hand. Control and driver boards are not ready yet. Here, the required circuit is constructed on bread boards.
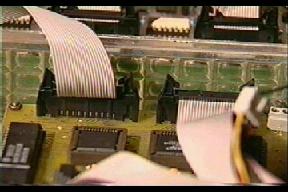
Now the hardware is complete and it can control the position of 12 motors simultaneously using PWM technique. Here you can see the back view of the face with its wires connected to controller and driver boards.
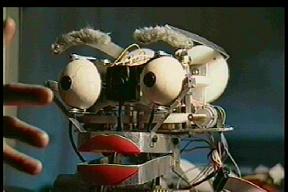
Now hardware and software are integrated. In this video, Aryan expresses its surprise emotion by seeing hand. It also adjusts its gaze direction toward the hand and pursues its motion.

This is a close up view showing eye movements. You can see the vergence and common tilt eye movements.

Here the view is so close that only one of the eyes is visible. Pan and tilt motions of the eye can be easily seen here.