
AAMAS-2008 paper
| protoswarm: programming multirobots using the amorphous medium abstraction | |
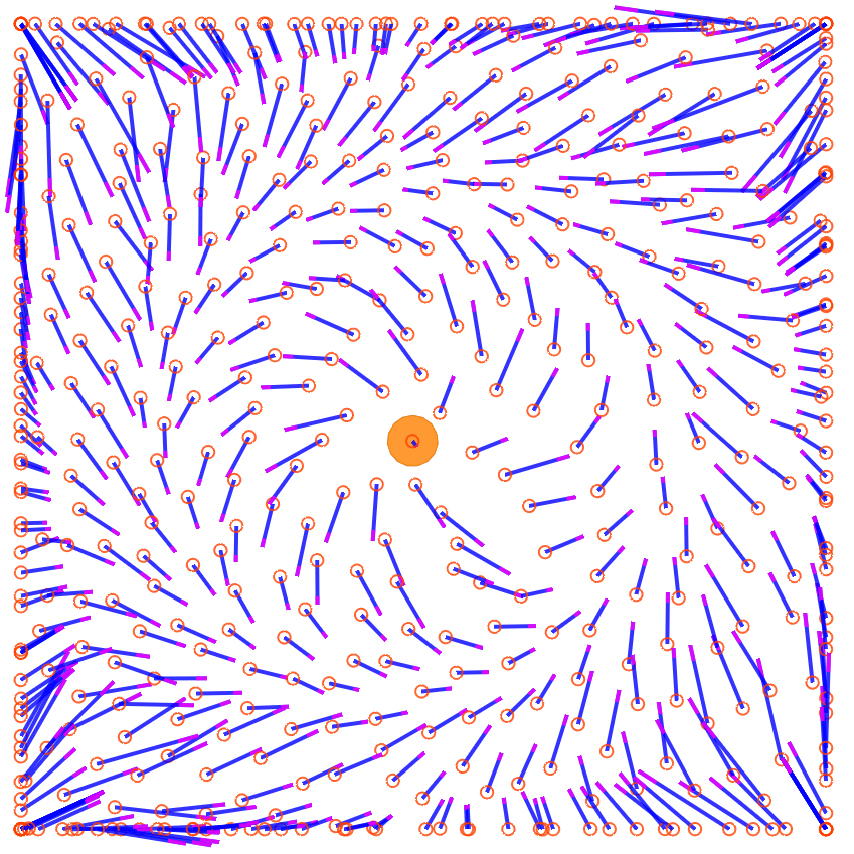
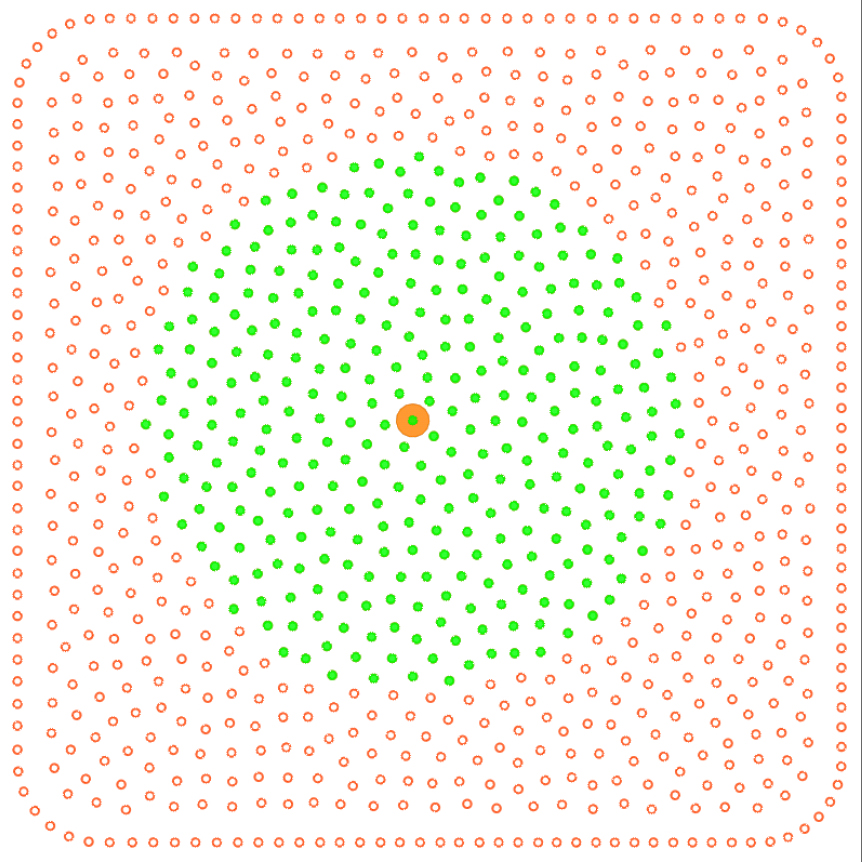
| What | Multi-robot systems are becoming increasingly prevalent, but programmability is a major barrier to their deployment. Present systems force programmers to think in terms of individual agents. Application code becomes entangled with details of coordination and robustness and often does not compose well or translate to other domains. We offer an alternate approach whereby the programmer controls a single virtual spatial computer which fills the environment space. The computations on this spatial computer are actually performed by a large number of locally-interacting individual agents. This abstracts the actual computational hardware behind the spatial computer interface, and allows the programmer to focus on a single model of global computation. We achieve this abstraction with two components: a language that embodies continuous space and time semantics and a runtime library that implements these semantics approximately. We demonstrate the efficacy of our approach with multi-agent algorithms in both simulation and on a group of 40 robots. |
| Which | AAMAS-2008 paper |
| Why | higher level programming of robots that is robust to faults and numbers of robots |
| Who | jonathan bachrach, james mclurkin, tony grue |
| How | proto |
| When | 2007 |
| Where | mit csail |
| And | proto |