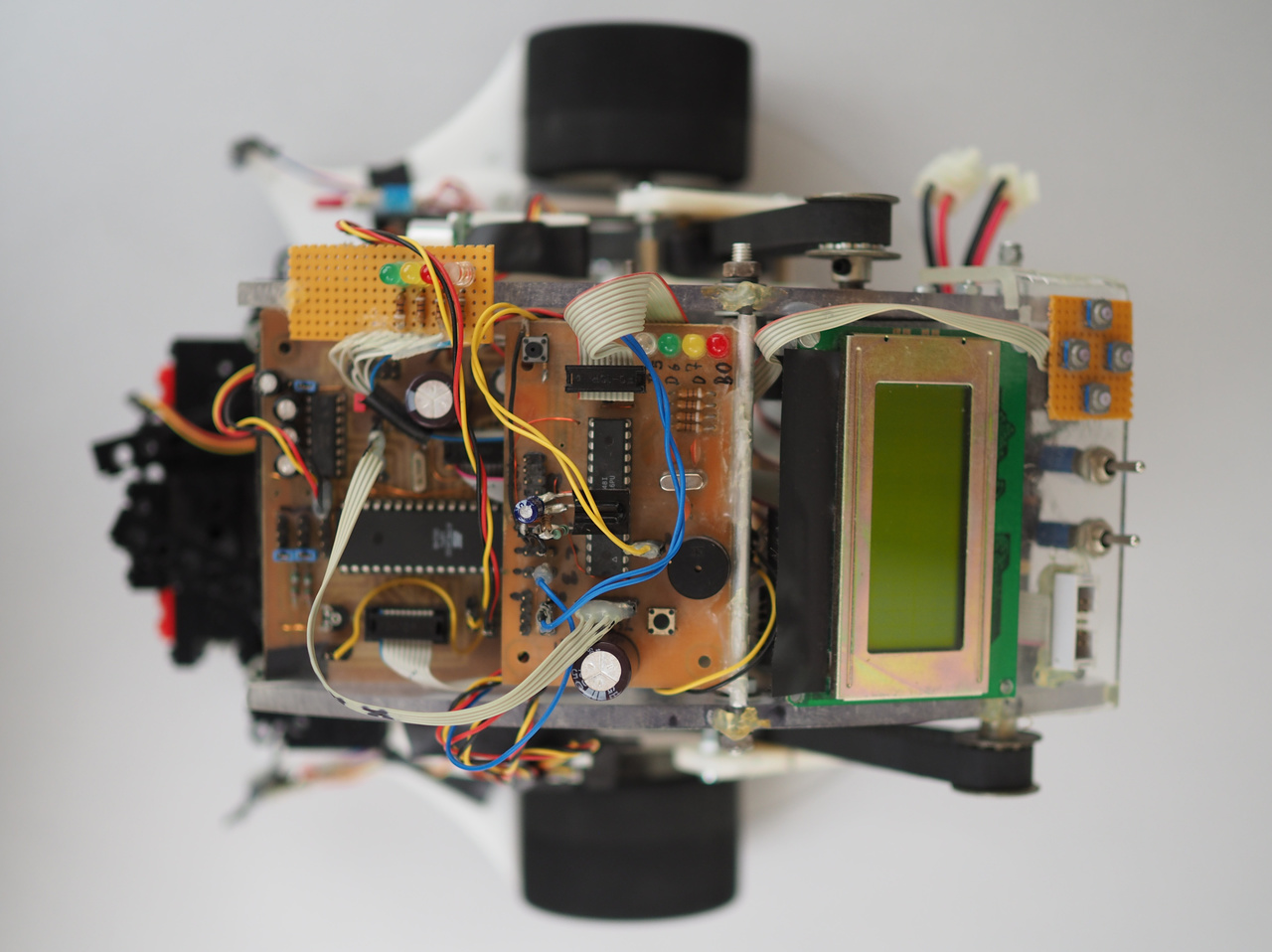
Kno.2Bot for Roboking 2006
Kno.2Bot had a localization system based on its odometry and was able to correct its position from distance measurements to the walls of the known playground. A solenoid powered kicker enabled it to shoot ping-pong balls. I was honored by my high-school for the term paper about the construction and control of the robot “Aufbau und Programmierung eines Wettbewerbroboters”.