Multi-turn Tension-stiffening Catheter Navigation System
Current catheter guiding techniques rely on considerable dexterity and skill of the physician, and are restricted to very simple paths when in poorly constrained areas of the body (such as areas around the lung, heart, or even within the vascular system with certain diseases. Prior proposals for improved catheter systems have focused on control and navigation of the distal tip, allowing the remaining length to freely drag behind. Unfortunately, this is not always the most desirable solution. Surgeons have expressed the desire for an option that allows the catheter to effectively traverse multiple free-standing bends.
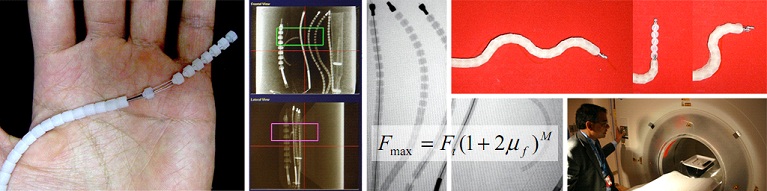
This robotic catheter system can execute curved paths and maintain several three-dimensional turns using Tension Stiffening Guide-wires (TSGs). The "Tension Stiffening Guide-Wires" are composed of a set of disposable friction-locking beads with internal tension cables. An external, reusable control unit completes the system and is used to automate the movement of the catheter, and handle closed loop control in conjunction with real time digital fluoroscopy. Within safety limits that are physically designed into the mechanism, the TSG does not rely on external constraints to guide its path and can readily make and maintain multiple turns during the procedure.
The Multi-turn Tension-stiffening Catheter Navigation System provides for faster and more accurate catheter placement, which can speed up overall procedure times, reduce internal trauma, and allow for new procedures that were previously impossible with (minimally invasive) catheterization. Examples of procedures that could benefit from such a device include interventions inside hollow viscera, navigation through solid organs, access for biopsy and drainage procedures, and intra-hepatic or trans-hepatic procedures such as portal vein access, biliary drainage and stone retrieval.
Mathematical analyses were performed to predict contact forces between beads, change in guide-wire conformation due to external forces, tip deflection, governing limits on conformation complexity, and failure modes. As these results have wide ranging applications in many embodiments of catheter design, we chose to publish the work (see citation below) for public consumption. This was a collaboration as part of a class with Alex Slocum (MIT PERG), Rajiv Gupta (MGH) and fellow students Yi Chen, Jean Chang, and Alison Greenlee. My primary contribution to the project was Tension Stiffening Guide-wire design and prototyping, as well as analysis of limits on conformation complexity.
Chen, Y., Chang, J., Greenlee, A.S., Cheung, K.C., Slocum, A.H., Gupta, R., Multi-turn, Tension-stiffening Catheter Navigation System, Proceedings of 2010 IEEE ICRA, May 3-8, 2010, Anchorage, Alaska.