Moteins
Media Coverage:
MIT News
fastcodesign
inhabitat
Many fields (e.g., robotics in prototyping and manufacturing) have applications that call for large displacement and highly precise shape transformation, ranging from meter scale manufacturing equipment to actively adaptive optics with micron scale features. In other words, we want robot transformers! Many modular or self-reconfigurable robotic systems have been proposed in the past, spawning the reconfigurable robotics research field, but most either have a very limited range of target shapes and motions, or are composed of impressively (but unfortunately not usefully) complex and expensive components.
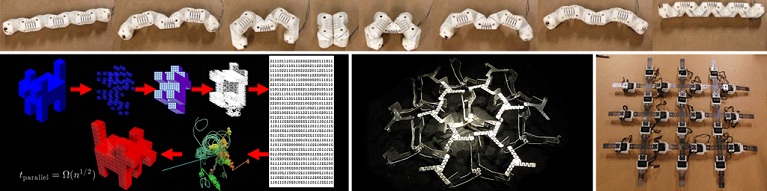
Moteins apply mathematical proofs of universal foldability to make simple universal transformers (systems that can make any shape, using very few types of very simple units). For instance, one example embodiment, named the 'milli-motein,' is a chain robot design that accomplishes shape universality with only one type of unit, with a single degree of freedom per unit. This example, together with methods and mathematical proofs, is the subject of recently published theory and mechanism papers (see citations below). Results include the ability to pack a robotic string to fill any continuous three dimensional shape, without self-intersection, and the existence of continuous motion for self-assembly and self-reconfiguration of this string. Optimization schemes for motion planning are elaborated upon, as well.
In the short term, we envision machines such as construction equipment, which utilize Cellular Automotion to achieve digital robustness. Instead of complex aggregations of unique actuators like is used today (for instance, a backhoe), many lifting, moving, or pushing tasks may be performed by various aggregations of many copies of the same basic unit. This way, unpredicted tasks (i.e. custom loads or motions) may be adapted to, and any loss of function is incremental and easily managed (with the ability to swap out units).
Continuing research also looks towards small scale applications, including bioengineering. The understanding of DNA and protein folding has reached a point where we can synthesize simple mechanisms. With the principles of Cellular Automotion, this is all that is necessary to make complex nucleic acid and peptide based machines. So, we are investigating the capability of these systems at the molecular level, with wide ranging potential medical and scientific applications.
Cellular Automotion has been submitted for US (2010/0292836) and international patents.
Cheung, K. C., Demaine, E. D., Bachrach, J. R., and Griffith, S., Programmable Assembly With Universally Foldable Strings (Moteins), IEEE Transactions on Robotics, vol. 27, no. 4, pp. 718-729 (2011). (robot proof of concept - kcc) (dynamics simulation - kcc) (playback heuristic - jrb) (probabilistic roadmap - jrb)
Knaian, A. N., Cheung, K. C., Lobovsky, M., Oines, A., Schmidt-Nielsen, P., & Gershenfeld, N. (2012). The Milli-Motein: A Self-Folding Chain of Programmable Matter with a One Centimeter Module Pitch. IEEE/RSJ IROS 2012.