Policies for Multirobot Control
With today’s technology, robots can replace humans in all kinds of tasks, including search and rescue, demining, and reconnaissance missions. Different types of missions demand different roles for robots; therefore, approaches for coordinated autonomy are necessary. By automating the controller synthesis, we can design control policies from high level specifications, decrease response time, and enable robots to self-organize.
PROBABILISTIC METHODS IN UNKNOWN ENVIRONMENTS
In environments containing unknown threats to robots, how can we design or choose control policies which maximize safety while ensuring the tasks are still completed. How can robots coordinate to generate the best task assignment according to the current estimate of the environment state? How much communication is necessary to generate a sufficeiently good estimate of the state of the enviroment? These are questions I hope to answer in my current research.
SEQUENTIAL COMPOSITION IN COMPLEX ENVIRONMENTS
The method I have developed provides guarantees on convergence and is complete, meaning that a solution will be found if one exists. Unlike abstractions and leader-follower formulations, my method allows navigation to different parts of the environment and provides guarantees on safety, i.e. maintaining interrobot constraints and avoiding collisions in the presence of obstacles.
The task configuration space is constructed by taking the Cartesian product of the configuration spaces of each robot, then intersecting with the constraints.
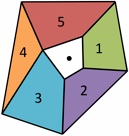
Sample interrobot constraints
This results in a configuration space composed of polytopes, where a discrete flow to the goal polytope can be determined using a graph search technique such as A* or Dijkstra, or incremental techniques such as D* or D*lite, with the notion of sequential composition.
The flow determines an exit facet for each polytope, which is used to synthesize controllers in each polytope that, when sequentially composed, drive the system to the goal. I have developed two feedback controllers for sequential composition on polytopes of arbitrary dimension.
One results in decentralized linear feedback, in a sense that the feedback for an agent does not explicitly rely on the state of another agent which is not in direct communication, and is applicable to first order systems [ICRA 2008].
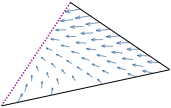
Sample vector field for linear feedback
The other is a smooth, centralized feedback using a navigation function, and is also applicable to second order dynamical systems [In Preparation]. I have applied these controllers to create formations [ISRR 2009] and, in conjunction with high-level structured English task specifications, to sorting tasks [CASE 2008].
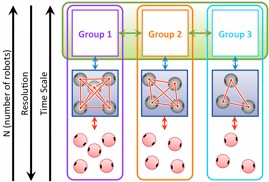
ABSTRACTIONS WITH INTERROBOT CONSTRAINTS
When navigating a group of robots to a single task location, an abstraction of the individual robot states to a “group state”' allows complexity management. Yet most approaches using abstractions in the literature do not allow interrobot constraints such as maintaining network or communication topology. In my work, I have used a hierarchical approach and time scale separation to make this possible [ISRR 2009, ICRA 2010]. The abstraction defines a deformable virtual boundary for the robots. As the virtual boundary navigates the environment using a feedback controller, the rotation, translation, and deformation of the boundary is passed onto the robots, which, by summing an intra-group controller with the boundary controller, navigate the environment safely to the goal location. Using this approach, we can navigate multiple groups of robots without the complexity of navigating many individual robots.