| Cog |
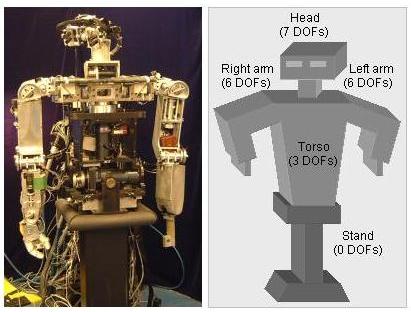
Cog (more information)
|
|
RobotsI'm interested in building adaptive, general-purpose robots, to try and understand what might underlie our own adaptivity. In the Humanoid Robotic Groups we work on many robots including Cog, Kismet, Coco, Cardea, and Obrero. For more on my work, see my research page; for more information on each of these robots, read on.
|
Cog (more information) |
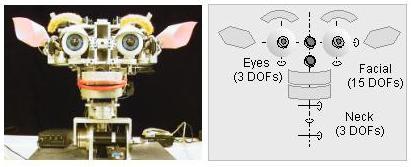 Kismet (more information) 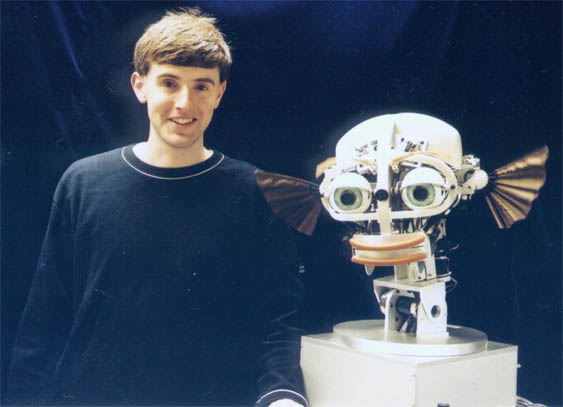 K4, a follow-on to Kismet |
 Coco (more information) |
 Cardea (more information) |
 Obrero (more information) |
|
|