The second step, defining interfaces for families of devices, is important in the longer term. If you change your camera or your motor control board, how much of your code needs to change too? If you view your devices through well thought out interfaces, the impact of device change can be minimized.
The third step, network wrappers, is important to give flexibility. You can scale up your computing cluster, or isolate hardware devices that don't play well together, or have specific OS dependencies etc.
A driver in YARP is just a C++ class. Interfaces are simply abstract base classes. And network wrappers are just special cases of devices that happen to use network resources to satisfy their interfaces. Let's look at some examples to make this clear.
class yarp::dev::IFrameGrabberImage { public: virtual bool getImage(yarp::sig::ImageOf<yarp::sig::PixelRgb>& image) = 0; virtual int height() const = 0; virtual int width() const = 0; };
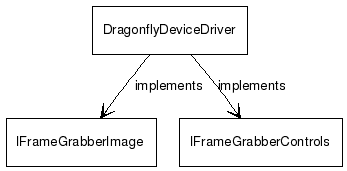
Notice that IFrameGrabberImage doesn't do anything itself -- it just declares methods to get an image and image dimensions. There are several classes in YARP that implement this interface (in other words, they inherit from it and define the methods). One example is DragonflyDeviceDriver. This interfaces with a Point Grey digital camera, using different libraries on different operating systems. It implements several interfaces; here are just two of them:
Since you may not have any hardware devices available to you right now, let's make a "fake" framegrabber that implements the IFrameGrabberImage interface:
class FakeFrameGrabber : public yarp::dev::IFrameGrabberImage { private: int w, h; public: FakeFrameGrabber(int w, int h) : w(w), h(h) { } virtual bool getImage(yarp::sig::ImageOf<yarp::sig::PixelRgb>& image) { Time::delay(0.5); // simulate waiting for hardware to report image.resize(w,h); image.zero(); return true; } virtual int height() const { return h; } virtual int width() const { return w; } };
All this does is return blank images roughly every half second, but it does indeed implement the IFrameGrabberImage interface.
We very nearly have a YARP device driver. Sometimes we want to be able to create devices flexibly, based on a configuration file, or without having to worry about where their header file is. For these purposes, YARP requires that:
#include <yarp/os/all.h> #include <yarp/sig/all.h> class FakeFrameGrabber : public yarp::dev::IFrameGrabberImage, public yarp::dev::DeviceDriver { private: int w, h; int ct; yarp::sig::PixelRgb circlePixel; public: FakeFrameGrabber() { h = w = 0; ct = 0; circlePixel = yarp::sig::PixelRgb(255,0,0); } bool open(int w, int h) { this->w = w; this->h = h; return w>0 && h>0; } virtual bool open(yarp::os::Searchable& config) { // extract width and height configuration, if present // otherwise use 128x128 int desiredWidth = config.check("w",yarp::os::Value(128)).asInt(); int desiredHeight = config.check("h",yarp::os::Value(128)).asInt(); return open(desiredWidth,desiredHeight); } virtual bool close() { return true; // easy } virtual bool getImage(yarp::sig::ImageOf<yarp::sig::PixelRgb>& image) { yarp::os::Time::delay(0.1); // simulate waiting for hardware to report image.resize(w,h); image.zero(); yarp::sig::draw::addCrossHair(image,circlePixel, ct,h/2,h/8); ct = (ct+4)%w; return true; } virtual int height() const { return h; } virtual int width() const { return w; } };
Now we have a good YARP device driver (even if it is fake). We've chosen to require that the width and height of images be greater than zero, which seems reasonable. (A moving crosshair has been added to the image just to make things more interesting).
FakeFrameGrabber fakey; fakey.open(640,480); ImageOf<PixelRgb> img; fakey.getImage(img); ...
If we're smart, we'd make as much of our code as possible depend just on the interface IFrameGrabberImage, so that we can reuse it or substitute in a different framegrabber later:
// creation and configuration -- depends on specific device type FakeFrameGrabber fakey; fakey.open(640,480); IFrameGrabberImage& genericGrabber = fakey; // from here on, we only care that our device implements IFrameGrabberImage ImageOf<PixelRgb> img; genericGrabber.getImage(img); ...
Suppose we want to go further, and let the framegrabber we use be controlled by a command line option. So it could either be our FakeFrameGrabber, or a real device like DragonflyDeviceDriver or PicoloDeviceDriver (another framegrabber), or RemoteFrameGrabber (a proxy for a framegrabber device on another machine).
YARP comes with a helper for doing this. It maintains a simple database of the drivers you have compiled and available. You can see this database by running "yarpdev", which tells you something like:
... Here are devices listed for your system: Device <dragonfly> documented by the C++ class DragonflyDeviceDriver Wrapped for the network by <grabber> Device <test_grabber> documented by the C++ class TestFrameGrabber Wrapped for the network by <grabber> Device <grabber> documented by the C++ class ServerFrameGrabber Does not need a network wrapper. ...
You can instantiate any device listed here from your code as follows:
#include <yarp/dev/PolyDriver.h> #include <yarp/dev/FrameGrabberInterface.h> using namespace yarp::dev; PolyDriver dd("dragonfly"); if (!dd.isValid()) { printf("Dragonfly not available\n"); exit(1); } IFrameGrabberImage *grabber; dd.view(grabber); if (grabber!=NULL) { printf("*** Device can supply images\n"); ImageOf<PixelRgb> img; if (grabber->getImage(img)) { printf("*** Got a %dx%d image\n", img.width(), img.height()); } }
If we want to be able to create a FakeFrameGrabber through the same mechanism, we need to add a factory for it to the device driver database. Here's how:
DriverCreator *fakey_factory = new DriverCreatorOf<FakeFrameGrabber>("fakey","grabber","FakeFrameGrabber"); Drivers::factory().add(fakey_factory); // hand factory over to YARP
Now we can do:
PolyDriver dd("fakey"); IFrameGrabberImage *grabber; dd.view(grabber); if (grabber==NULL) { exit(1); } // failed // from here on, we only care that our device implements IFrameGrabberImage ImageOf<PixelRgb> img; grabber->getImage(img); ...
This form is calling FakeFrameGrabber::open without any configuration information set up. To pass in configuration options, we do:
Property config("(device fakey) (w 640) (h 480)");
PolyDriver dd(config);
...
Property config;
config.fromCommand(argc,argv) // parse command line
PolyDriver dd(config);
...
As a review, here's a full program with what we've done: (from example/dev/fake_grabber.cpp):
#include <stdio.h> #include <yarp/dev/FrameGrabberInterfaces.h> #include <yarp/dev/PolyDriver.h> #include <yarp/dev/Drivers.h> #include "FakeFrameGrabber.h" using namespace yarp::os; using namespace yarp::sig; using namespace yarp::dev; int main(int argc, char *argv[]) { Network::init(); // give YARP a factory for creating instances of FakeFrameGrabber DriverCreator *fakey_factory = new DriverCreatorOf<FakeFrameGrabber>("fakey", "grabber", "FakeFrameGrabber"); Drivers::factory().add(fakey_factory); // hand factory over to YARP // use YARP to create and configure an instance of FakeFrameGrabber Property config; if (argc==1) { // no arguments, use a default config.fromString("(device fakey) (w 640) (h 480)"); } else { // expect something like "--device fakey --w 640 --h 480" // or "--device dragonfly" // or "--device test_grabber --period 0.5 --mode [ball]" config.fromCommand(argc,argv); } PolyDriver dd(config); if (!dd.isValid()) { printf("Failed to create and configure a device\n"); exit(1); } IFrameGrabberImage *grabberInterface; if (!dd.view(grabberInterface)) { printf("Failed to view device through IFrameGrabberImage interface\n"); exit(1); } ImageOf<PixelRgb> img; grabberInterface->getImage(img); printf("Got a %dx%d image\n", img.width(), img.height()); dd.close(); Network::fini(); return 0; }
This assumes we placed the FakeFrameGrabber class in a header file called "FakeFrameGrabber.h".
Here are a few ways to call the program, all of which result in different devices being used:
./fake_grabber --device fakey --w 640 --h 480 ./fake_grabber --device dragonfly ./fake_grabber --device test_grabber --period 0.5 --mode [ball]
The last possibility, test_grabber, is a device driver very much like fakey that is already compiled into the YARP device library, libYARP_dev.
Since fakey implements the IFrameGrabberImage, we can use the grabber (ServerFrameGrabber) network wrapper to put it on the network: (from example/dev/fake_grabber_net.cpp)
#include <stdio.h> #include <yarp/dev/FrameGrabberInterfaces.h> #include <yarp/dev/PolyDriver.h> #include <yarp/dev/Drivers.h> #include "FakeFrameGrabber.h" using namespace yarp::os; using namespace yarp::sig; using namespace yarp::dev; int main() { Network::init(); // give YARP a factory for creating instances of FakeFrameGrabber DriverCreator *fakey_factory = new DriverCreatorOf<FakeFrameGrabber>("fakey", "grabber", "FakeFrameGrabber"); Drivers::factory().add(fakey_factory); // hand factory over to YARP // use YARP to create and configure a networked of FakeFrameGrabber Property config; config.fromString("(device grabber) (name /fakey) (subdevice fakey) (w 200) (h 200)"); PolyDriver dd(config); if (!dd.isValid()) { printf("Failed to create and configure a device\n"); exit(1); } // snooze while the network device operates while (true) { printf("Network device is active...\n"); Time::delay(5); } Network::fini(); return 0; }
If you run this program, you should see something like:
Subdevice fakey Created device <fakey>. See C++ class FakeFrameGrabber for the interfaces supported. yarp: Port /fakey listening at tcp://17.166.9.122:10002 Created wrapper <grabber>. See C++ class ServerFrameGrabber for the interfaces supported. Network device is active... Server grabber starting Network framegrabber writing a 200x200 image... Network device is active... Network device is active...
The YARP port "/fakey" is now a network access point for an instance of our fake framegrabber. One way to see this is by starting a viewer:
./yarpview --name /view yarp connect /fakey /view
We can also access the framegrabber via code (example/dev/grabber_client.cpp):
#include <stdio.h> #include <yarp/os/all.h> #include <yarp/sig/all.h> #include <yarp/dev/FrameGrabberInterfaces.h> #include <yarp/dev/PolyDriver.h> #include <yarp/dev/Drivers.h> using namespace yarp::os; using namespace yarp::sig; using namespace yarp::dev; int main() { Network::init(); Property config; config.fromString("(device remote_grabber) (local /client) (remote /fakey)"); PolyDriver dd(config); if (!dd.isValid()) { printf("Failed to create and configure device\n"); exit(1); } IFrameGrabberImage *grabberInterface; if (!dd.view(grabberInterface)) { printf("Failed to view device through IFrameGrabberImage interface\n"); exit(1); } ImageOf<PixelRgb> img; grabberInterface->getImage(img); printf("Got a %dx%d image\n", img.width(), img.height()); dd.close(); Network::fini(); return 0; }
If you have left fake_grabber_net running, and now run this, you should see:
yarp: Port /client listening at tcp://172.16.93.1:10002 yarp: Receiving input from /fakey to /client using tcp yarp: Sending output from /client to /fakey using tcp Created device <remote_grabber>. See C++ class RemoteFrameGrabber for the interfaces supported. Got a 200x200 image yarp: Removing input from /fakey to /client yarp: Removing output from /client to /fakey
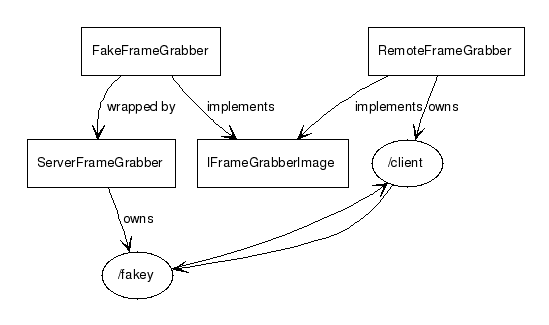
For code that depends only on IFrameGrabberImage, there is no apparent difference between a FakeFrameGrabber and RemoteFrameGrabber.
class yarp::dev::IFrameGrabberControls { public: virtual bool setBrightness(double v) = 0; virtual bool setShutter(double v) = 0; virtual bool setGain(double v) = 0; virtual double getBrightness() const = 0; virtual double getShutter() const = 0; virtual double getGain() const = 0; };
Let's use this interface to control the brightness of the shape shown by FakeFrameGrabber (this is from example/dev/FakeFrameGrabber2.h in the YARP source code, make sure you update from CVS for this section):
#include <yarp/os/all.h> #include <yarp/sig/all.h> class FakeFrameGrabber : public yarp::dev::IFrameGrabberImage, public yarp::dev::IFrameGrabberControls, public yarp::dev::DeviceDriver { private: ... yarp::sig::PixelRgb circlePixel; double brightness; public: ... virtual bool setBrightness(double v) { if (v>1) v = 1; if (v<0) v = 0; circlePixel = yarp::sig::PixelRgb((unsigned char)(255*v),0,0); brightness = v; return true; } virtual bool setShutter(double v) { return false; } virtual bool setGain(double v) { return false; } virtual double getBrightness() const { return brightness; } virtual double getShutter() const { return 0; } virtual double getGain() const { return 0; } };
As before, the grabber (ServerFrameGrabber) network wrapper will put this on the network just as before (see and run example/dev/fake_grabber_net2.cpp).
And as before, we can see the image produced by starting a viewer:
./yarpview --name /view yarp connect /fakey /view
But now we can also query and command the fake framegrabber. From code, we can use the remote_grabber device driver,which implements IFrameGrabberControls. From the command line, we can use yarp rpc:
yarp rpc /fakey RPC connection to /fakey at tcp://172.16.232.1:10002 (connection name anon_rpc) [get] [bri] Response: [is] [bri] 1.0 [set] [bri] 0.5 Acknowledged [get] [bri] Response: [is] [bri] 0.5
 1.4.6
1.4.6