
About
I am a PhD candidate at MIT CSAIL. I work with Prof. Julie Shah in the Interactive Robotics Group. My research interests include reinforcement learning, interactive machine learning, and human-robot interaction. My aim is to develop intelligent robots that can adapt and generalize through interaction with people. Towards this goal, we are developing interpretable and interactive learning algorithms that can incorporate human feedback to improve transparency and learning in new environments.
I received my M.S. at MIT in 2015. My work involved developing algorithms to enable effective human-robot team training. Prior to MIT, I received my B.S. in Computer Science from Georgia Tech.
Research
Human-in-the-loop Simulation to Real World Transfer 
Deploying AI systems safely in the real world is challenging. The complex nature of the open world makes it difficult for machines trained on limited data to adapt and generalize well. The errors that can result from an imperfect model can be extremely costly (e.g., car accidents, robot collisions). We identify error regions, or blind spots, that occur due to mismatches between simulator and real-world environments through the help of a human. Detecting these errors can lead to safer deployment of these systems.
Interpretable Transfer Learning 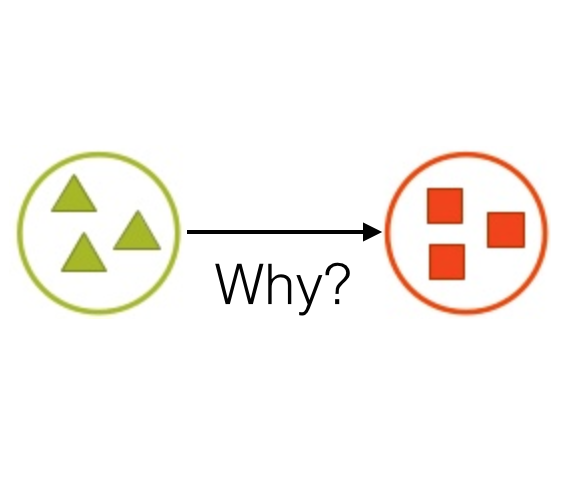
Developing intelligent agents that can interact in the real world requires agents to be adaptable to both situations and people. Generalizing to new situations requires successful transfer learning, or the adaptation of prior learned knowledge to new tasks. Adapting to people requires an interpretable medium for human-machine interaction. We are working on developing more interpretable transfer learning algorithms that can be incorporated more easily into interactive systems.
Learning Models for Human Preferences 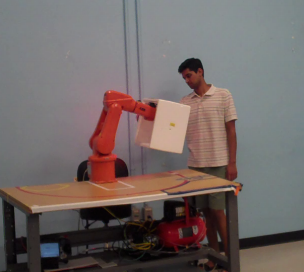
As robots are integrated more into environments with people, it is essential for robots to adapt to people's preferences. In this work, we automatically learn user models from joint-action demostrations. We first learn human preferences using an unsupervised clustering algorithm and then use inverse reinforcement learning to learn a reward function for each preference. When working with a new user, the hidden preference is inferred online. We demonstrate through human subject experiments on a collaborative refinishing task that the framework supports effective human-robot teaming.
Human-Robot Team Training 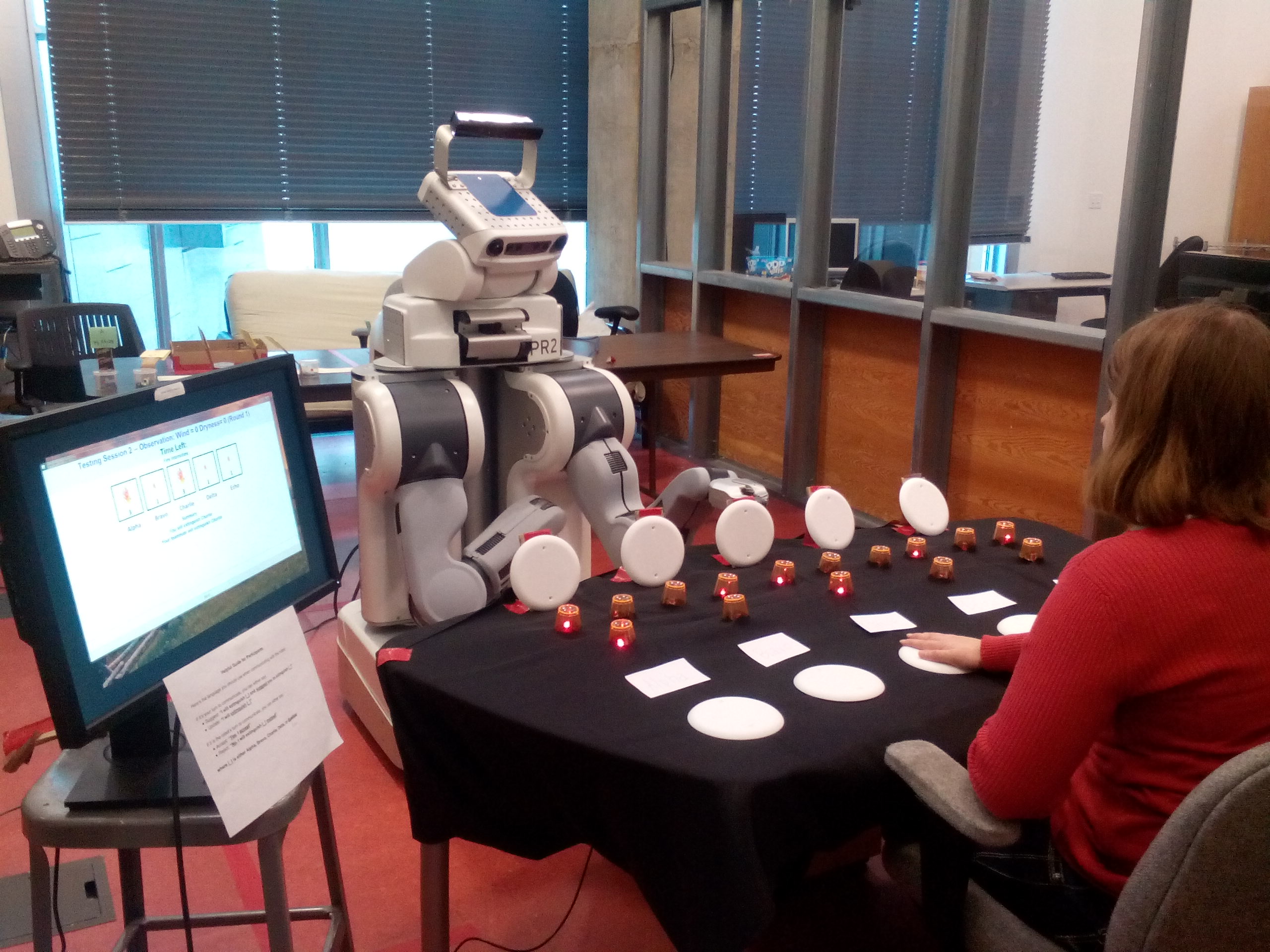
With a rise in joint human-robot teams, an important concern is how we can effectively train these teams. "Perturbation training" is a training approach used in human teams in which team members practice variations of a task to generalize to new situations. In this work, we develop the first end-to-end framework for human-robot perturbation training, which includes a multi-agent transfer learning algorithm, a human-robot co-learning framework, and a communication protocol. We perform computational and human subject experiments to validate the benefits of our framework.
Journal/Conference Publications
Blind Spot Detection for Safe Sim-to-Real Transfer
Ramya Ramakrishnan, Ece Kamar, Debadeepta Dey, Eric Horvitz, Julie Shah
Accepted to Journal of Artificial Intelligence Research (JAIR) 2019
Ramya Ramakrishnan, Ece Kamar, Debadeepta Dey, Eric Horvitz, Julie Shah
Accepted to Journal of Artificial Intelligence Research (JAIR) 2019
Overcoming Blind Spots in the Real World: Leveraging Complementary Abilities for Joint Execution
Ramya Ramakrishnan, Ece Kamar, Besmira Nushi, Debadeepta Dey, Julie Shah, Eric Horvitz
Association for Advancement of Artificial Intelligence (AAAI) 2019
Ramya Ramakrishnan, Ece Kamar, Besmira Nushi, Debadeepta Dey, Julie Shah, Eric Horvitz
Association for Advancement of Artificial Intelligence (AAAI) 2019
Discovering Blind Spots in Reinforcement Learning
Ramya Ramakrishnan, Ece Kamar, Debadeepta Dey, Julie Shah, Eric Horvitz
Autonomous Agents and Multiagent Systems (AAMAS) 2018
Ramya Ramakrishnan, Ece Kamar, Debadeepta Dey, Julie Shah, Eric Horvitz
Autonomous Agents and Multiagent Systems (AAMAS) 2018
Perturbation Training for Human-Robot Teams
Ramya Ramakrishnan, Chongjie Zhang, Julie Shah
Journal of Artificial Intelligence Research (JAIR) 2017
Ramya Ramakrishnan, Chongjie Zhang, Julie Shah
Journal of Artificial Intelligence Research (JAIR) 2017
Efficient Model Learning from Joint-Action Demonstrations for Human-Robot Collaborative Tasks
Stefanos Nikolaidis, Ramya Ramakrishnan, Keren Gu, Julie Shah
Human-Robot Interaction (HRI) 2015
[Best Paper Award - Enabling Technologies]
Stefanos Nikolaidis, Ramya Ramakrishnan, Keren Gu, Julie Shah
Human-Robot Interaction (HRI) 2015
[Best Paper Award - Enabling Technologies]
Improved Human-Robot Team Performance through Cross-Training, A Human Team Training Approach
Stefanos Nikolaidis, Pem Lasota, Ramya Ramakrishnan, Julie Shah
International Journal of Robotics Research (IJRR) 2015
Stefanos Nikolaidis, Pem Lasota, Ramya Ramakrishnan, Julie Shah
International Journal of Robotics Research (IJRR) 2015
Workshop/Symposium Publications
Bayesian Inference to Identify the Cause of Human Errors
Ramya Ramakrishnan*, Vaibhav Unhelkar*, Ece Kamar, Julie Shah
ICML: Generative Modeling and Model-Based Reasoning for Robotics and AI Workshop 2019
Ramya Ramakrishnan*, Vaibhav Unhelkar*, Ece Kamar, Julie Shah
ICML: Generative Modeling and Model-Based Reasoning for Robotics and AI Workshop 2019
Knowledge Transfer from a Human Perspective
Ramya Ramakrishnan, Julie Shah
AAMAS: Transfer in Reinforcement Learning Workshop 2017
Ramya Ramakrishnan, Julie Shah
AAMAS: Transfer in Reinforcement Learning Workshop 2017
Interpretable Transfer for Reinforcement Learning based on Object Similarities
Ramya Ramakrishnan, Karthik Narasimhan, Julie Shah
IJCAI: Interactive Machine Learning Workshop 2016
Ramya Ramakrishnan, Karthik Narasimhan, Julie Shah
IJCAI: Interactive Machine Learning Workshop 2016
Towards Interpretable Explanations for Transfer Learning in Sequential Tasks
Ramya Ramakrishnan, Julie Shah
AAAI Symposium: Intelligent Systems for Supporting Distributed Human Teamwork 2016
Ramya Ramakrishnan, Julie Shah
AAAI Symposium: Intelligent Systems for Supporting Distributed Human Teamwork 2016
Learning Human Types from Demonstration
Stefanos Nikolaidis, Keren Gu, Ramya Ramakrishnan, Julie Shah
AAAI Fall Symposium Series 2014
Stefanos Nikolaidis, Keren Gu, Ramya Ramakrishnan, Julie Shah
AAAI Fall Symposium Series 2014
From virtual to actual mobility: Assessing the benefits of active locomotion through an immersive virtual environment using a motorized wheelchair
Amelia Nybakke*, Ramya Ramakrishnan*, Victoria Interrante
IEEE Symposium on 3D User Interfaces (3DUI) 2012
Amelia Nybakke*, Ramya Ramakrishnan*, Victoria Interrante
IEEE Symposium on 3D User Interfaces (3DUI) 2012