Distributed Aggregation for Modular Robots in the Pivoting Cube Model
Abstract
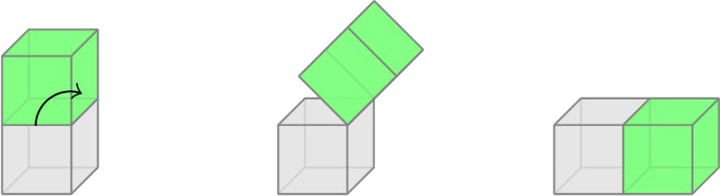
We present a distributed control strategy for the aggregation of multiple modular robots into one connected structure optimized for use with 3D modular pivoting cube robots such as the 3D M-Blocks. We use the intensity from a light source as input to a decentralized control algorithm that drives the robots together. We describe the algorithm, give provable guarantees on convergence, and discuss experiments carried out in simulation and with a hardware platform of ten 3D M-Blocks modules. In this paper we contribute provably correct algorithms for the aggregation of generic modular robots; we show how these algorithms can be applied on real hardware by evaluating them on the 3D M-Blocks platform.
Type
Publication
In Robotics and Automation, IEEE International Conference on