|
= Ph.D. candidate at MIT, advised by Prof. Julie A. Shah.
Previously, Email / CV / Google Scholar / Twitter / Github |
|
|

|
Shen Li, Vaibhav Unhelkar, Julie A. Shah, Sarah Chung Video, this exhibition is about human-robot collaboration and communication to prepare sandwiches and drinks for lunch, based on our previous work - HRI'20. |

|
Shen Li, Ankit Shah, Julie A. Shah, Sarah Chung Video, this exhibition is about teaching the robot to set the kitchen table, based on our previous work - PUns (RAL'20). |

|
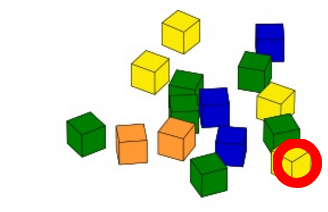
Nadia Figueroa, Yanwei Wang, Julie A. Shah, Sarah Chung Video, this exhibition is about teaching the robot to inspect widgets, based on our previous work - CoRL'22. |

|
Shen Li*, Theodoros Stouraitis*, Michael Gienger, Sethu Vijayakumar, Julie A. Shah RAL 2022 PDF/ code (in preparation) / video / MIT news / MIT Instagram / Voice Of America (from 12:07) / MIT Technology Review Brazil Set-based state estimation (1) with a probabilistic consistency guarantee, when dynamic and observation models are learned via GPs; (2) that can be formally reduced to its probabilistic counterpart - GP-EKF; robot-assisted dressing. |

|
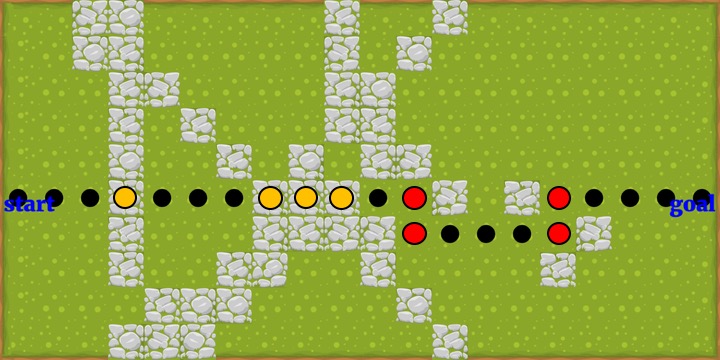
Shen Li, Nadia Figueroa, Ankit Shah, Julie A. Shah RSS 2021 Project page: PDF / code / videos / talk at RSS (5:04) / slides / poster / MIT CSAIL news / MIT Instagram / talk at MIT Horizon (30min, less technical) / featured in the Next Byte Podcast Human-aware motion planning with (1) a probabilistic guarantee on human physical safety, and (2) an improved task efficiency thanks to a two-pronged definition of safety: collision avoidance OR safe impact; robot-assisted dressing. |
|
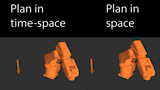
Shen Li, Julie A. Shah ICRA 2019 PDF / poster Robot motion-planning for safe (via collision avoidance) and efficient (via planning in both space-time) human-robot collaboration. |

|
Shen Li*, Daehyung Park*, Yoonchang Sung*, Julie A. Shah, Nicholas Roy ICRA 2021 arXiv / video (2:28) / slides Task-and-motion planning under robust against a human operator's cooperative or adversarial interventions. |

|
Vaibhav Unhelkar*, Shen Li*, Julie A. Shah HRI 2020 (23.6%) PDF / video (2:16) / talk video (9:27) / ZDNet news Robot decision-making on if, when, and what to communicate during collaboration. |

|
Vaibhav Unhelkar*, Shen Li*, Julie A. Shah CoRL 2019, Oral Presentation (5%) PDF / video (4:16) Semi-supervised human model learning => low efforts on parameter specification & high performance on robot collaborative decision-making. |

|
Tariq Iqbal, Shen Li, Christopher Fourie, Bradley Hayes, Julie A. Shah ICRA 2019 PDF / video (2:49) / poster / PBS NewsHour (from 2:58) Fast online human activity recognition + robot assistance at the appropriate time. |
|
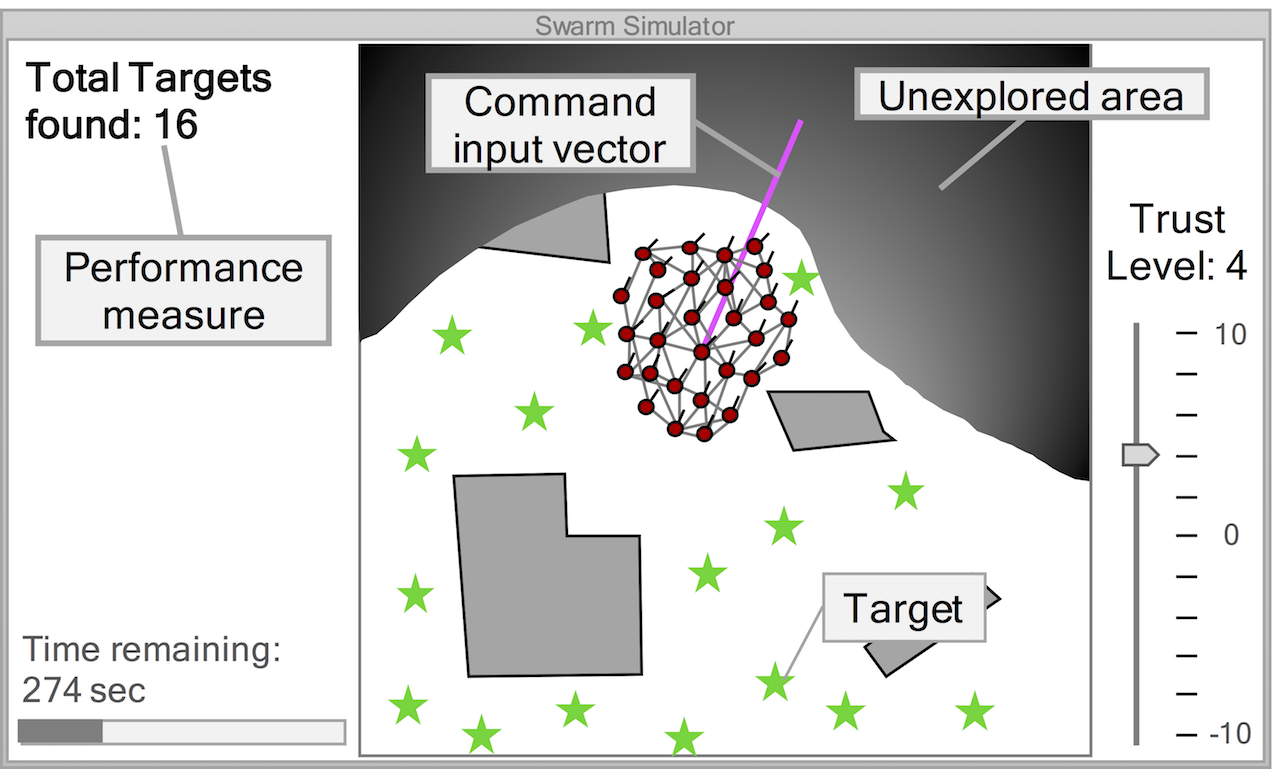
Changjoo Nam, Huao Li, Shen Li, Michael Lewis, Katia Sycara, SMC 2018 PDF / project page Trust and performance in supervisory control of swarm robots with varied levels of autonomy. |

|
Yanwei Wang, Nadia Figueroa, Shen Li, Ankit Shah, Julie A. Shah CoRL 2022, Oral Presentation (6.5%) PDF / project page / PBS NewsHour (0:37-1:30) Imitation learning for continuous motion + discrete plan (as LTL formula). |

|
Ankit Shah, Shen Li, Julie A. Shah RA-L & ICRA 2020 PDF / video (2:11) / MIT news Robot decision-making under uncertain & non-Markovian task specifications. |

|
Ankit Shah, Pritish Kamath, Shen Li, Patrick Craven, Kevin Landers, Kevin Oden, Julie A. Shah IJRR 2021 (accepted) Robot learning non-Markovian task specifications from human demonstrations. |
|
|
Ankit Shah, Pritish Kamath, Shen Li, Julie A. Shah NeurIPS 2018 PDF / project page / video (3:05) / poster Robot learning non-Markovian task specifications from human demonstrations. |
|
Rosario Scalise*, Shen Li*, Henny Admoni, Stephanie Rosenthal, Siddhartha Srinivasa IJRR 2018 PDF / project page A dataset of natural language instructions for object specification in manipulation scenarios (1582 instructions from online crowdsourcing). |
|
Shen Li*, Rosario Scalise*, Henny Admoni, Stephanie Rosenthal, Siddhartha Srinivasa RO-MAN 2017 Effectiveness of critical way-points in conveying info about robot objectives. |
|
Shen Li*, Rosario Scalise*, Henny Admoni, Stephanie Rosenthal, Siddhartha Srinivasa RO-MAN 2016 PDF / slides / CMU SEI blog Correlations between clarity of spatial reference instructions and 1) perspective taking 2) spatial features. Shen Li*, Rosario Scalise*, Henny Admoni, Stephanie Rosenthal, Siddhartha Srinivasa R:SS Workshop on Model Learning for Human-Robot Communication 2016 PDF / slides / poster |
|
|
Shen Li Master's thesis. Carnegie Mellon University. 2017 PDF / slides Thesis committee: Prof. Siddhartha Srinivasa (co-chair), Prof. Stephanie Rosenthal (co-chair), Prof. Reid Simmons, Prof. Stefanos Nikolaidis |
|
Webpage design courtesy of Jon Barron
|