This website uses Google Analytics to help us
improve the website content. This requires the use of
standard Google Analytics cookies, as well as a cookie to
record your response to this confirmation request. If this is
OK with you, please click 'Accept cookies', otherwise you will
see this notice on every page. For more information, please click
here.
We explore whether we can observe Time's Arrow in a temporal sequence -- is it possible to tell whether a video is running forwards or backwards?
We developed three methods based on machine learning and image statistics, and evaluate these methods on a video dataset collected by us.
We collect 180 high-quality videos, each is around 6-10 seconds.
The video contains 155 forward sequences and 25 intentionally backward sequences.
The full dataset can be downloaded here.
Top and bottom rows: two sampled sequences from our dataset
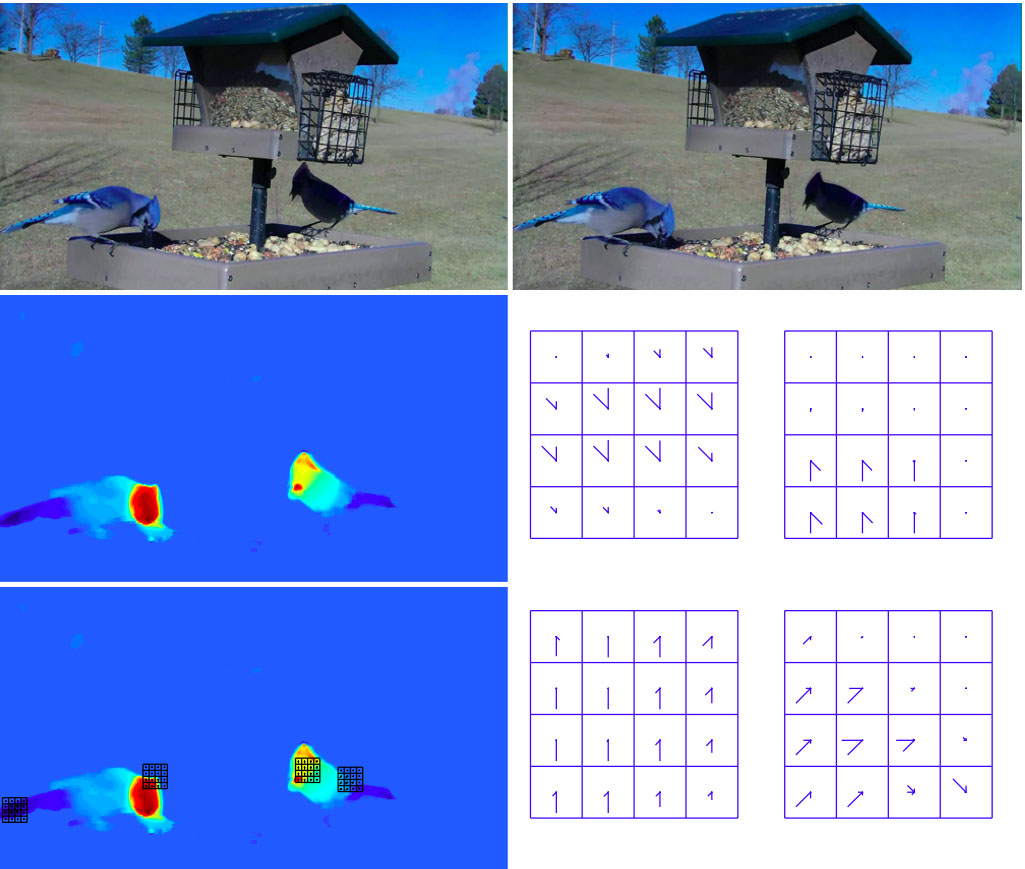
Method #1: Flow words
Videos are described by SIFT-like ''flow-words'', based on optical flow instead of image edges. We obtain 50 words from the training dataset, and achieve 75%-90% classification accuracy in three-fold cross validation.
Construction of Flow-words features. Top: pair of
frames at times t-1 and t+1, warped in to the coordinate frame
of the intervening image. Left: vertical component of optic flow
between this pair of frames; lower copy shows the same with the
small SIFT-like descriptor grids overlaid. Right: expanded view
of the SIFT-like descriptors shown left. Not shown: horizontal
components of optic flow which are also required in constructing
the descriptors.
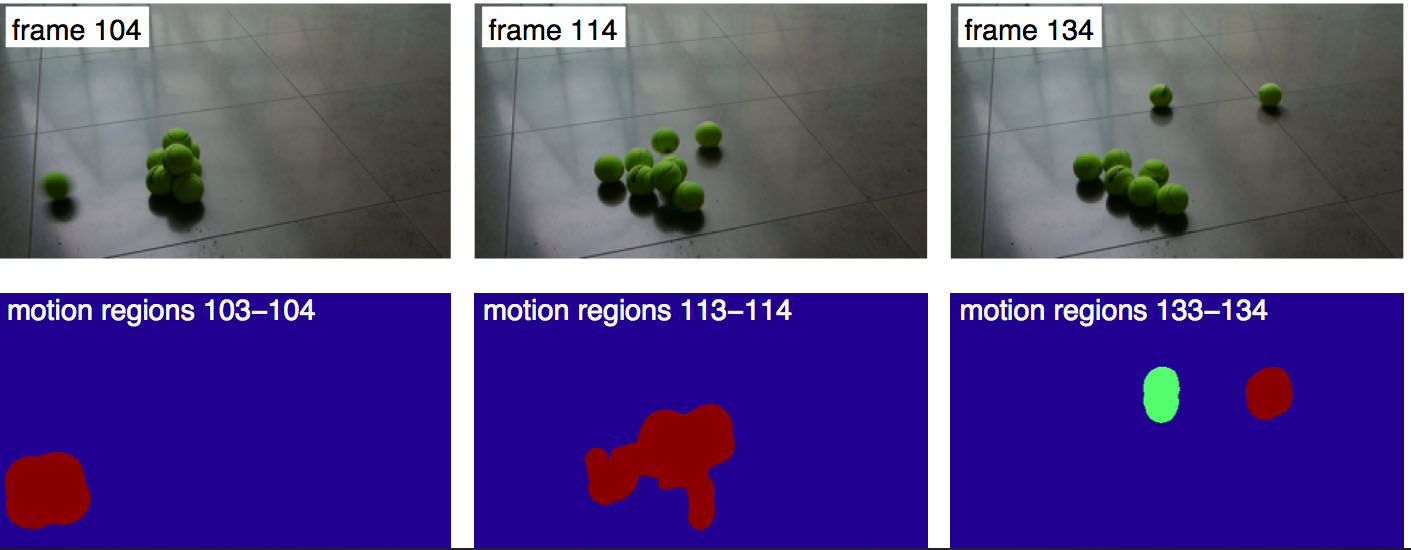
Method #2: Motion causality
Consider the case when a motion causing another motion, such as a ball hit another balls.
By using this cue, the accuracy is about 70%.
Three frames from one of the Tennis-ball dataset sequences,
in which a ball is rolled into a stack of static balls. Bottom
row: regions of motion, identified using only the frames at t
and t-1. Notice that the two rolling balls are identified as separate
regions of motion, and coloured separately in the bottom rightmost
plot. The fact that one rolling ball (first frame) causes two
balls to end up rolling (last frame) is what the motion-causation
method aims to detect and use.
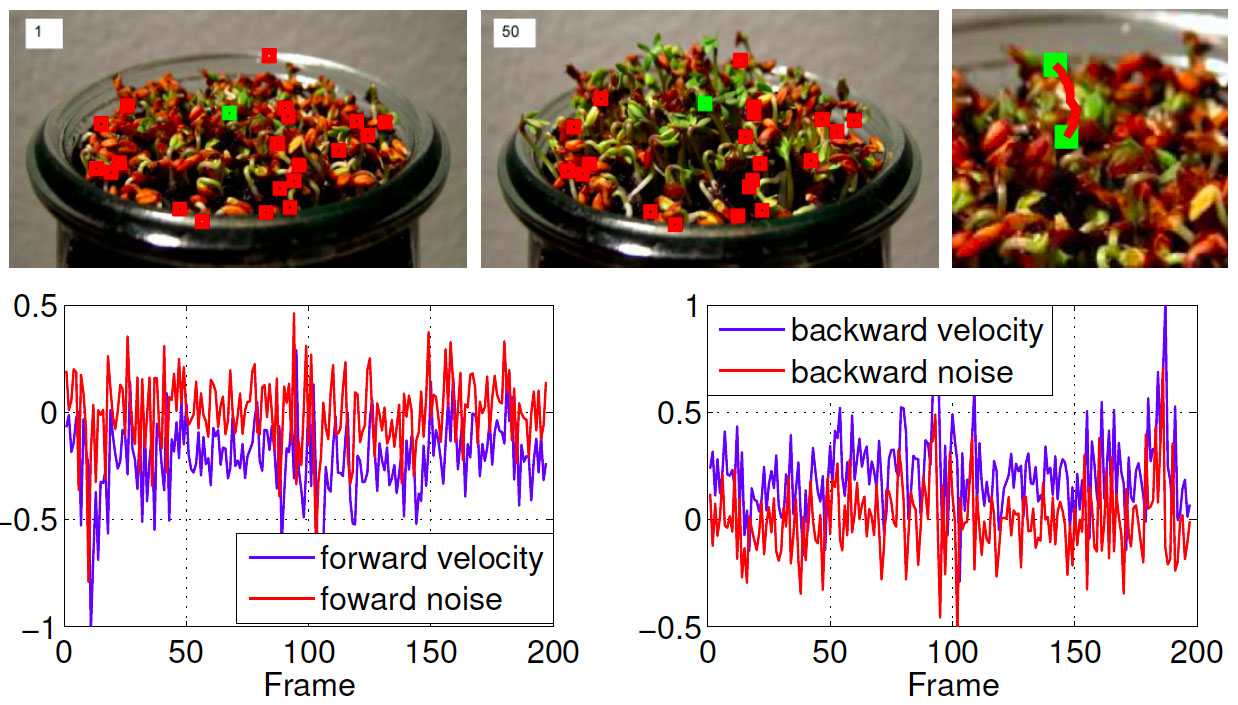
Method #3: Auto-regressive model
Consider the case when the object motion is linear, meaning that the current velocity is affected by the past. The motion noise is asymmetric between forward and backward sequence. Using only this cue,we achieve accuracy of 58%.
Top: tracked points from a
sequence, and an example track. Bottom: Forward-time (left) and
backward-time (right) vertical trajectory components, and the corresponding
model residuals. Trajectories should be independent
from model residuals (noise) in the forward-time direction only.
For the example track shown, p-values for the forward and backward
directions are 0.5237 and 0.0159 respectively, indicating that
forwards time is more likely.
Source code
The source code and the learnt flow words are released on the software page.
Publications
Lyndsey C. Pickup, Zheng Pan, Donglai Wei, YiChang Shih, Changshui Zhang, Andrew Zisserman, Bernhard Scholkopf, William T. Freeman
Seeing the Arrow of Time
IEEE Conference on Computer Vision and Pattern Recognition, 2014
@InProceedings{Hoai14,
author = "Lyndsey C. Pickup, Zheng Pan, Donglai Wei, YiChang Shih, Changshui Zhang, Andrew Zisserman, Bernhard Scholkopf, William T. Freeman",
title = "Seeing the Arrow of Time",
booktitle = "IEEE Conference on Computer Vision and Pattern Recognition",
year = "2014",
}
We explore whether we can observe Time's Arrow in a temporal sequence -- is it possible to tell whether a video is running forwards or backwards? We investigate this some- what philosophical question using computer vision and ma- chine learning techniques.
We explore three methods by which we might detect Time's Arrow in video sequences, based on distinct ways in which motion in video sequences might be asymmetric in time. We demonstrate good video forwards/backwards classification results on a selection of YouTube video clips, and on natively-captured sequences (with no temporally- dependent video compression). The motions our models have learned help discriminate forwards from backwards time.
Acknowledgements
This work was supported in the UK
by ERC grant VisRec no. 228180, in China by 973 Program
(2013CB329503), NSFC Grant no. 91120301, and in
the US by ONR MURI grant N00014-09-1-1051 and NSF
CGV-1111415.
Please report problems with this page to the vgg-webmasters at the robots.ox.ac.uk domain.
Last updated 7th Jun 2014.