Designing manipulation
tasks
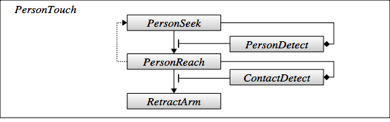
Module interaction
•Adjust
activation priorities
•Communicate
through the world
Module
•Local
task knowledge
•Estimate
readiness
Compose tasks through coordination of perception and control modules
Models and learning
•Simple prior models
•Control feedback to correct
for model errors
•Offline learning for detectors