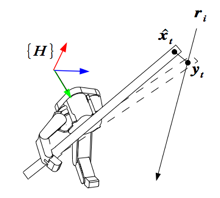
Tip servo control
Leverage strong prior on tip location
whenever
the wrist rotates:
dete
ct tip in image as
estimate probability is tip detection as
If
:
initialize block-matching visual tracker at
estimate tip location
using closest point of
to tracker ray
substitute
for
in the open-loop controller
Turns out many objects are well characterized by the peception and control of their distal tip
Tasks described as perception and ctrl of tooltips