Can we design naïve collaborators into a task?
•10
subjects
•6 trials
each
•Naïve to
task
•Varied
experience with robots•Incentive
during release
Cues:
•Voice “ok”
•Eye-gaze
•Reach
direction
•Reach
length
•Wrist
orientation
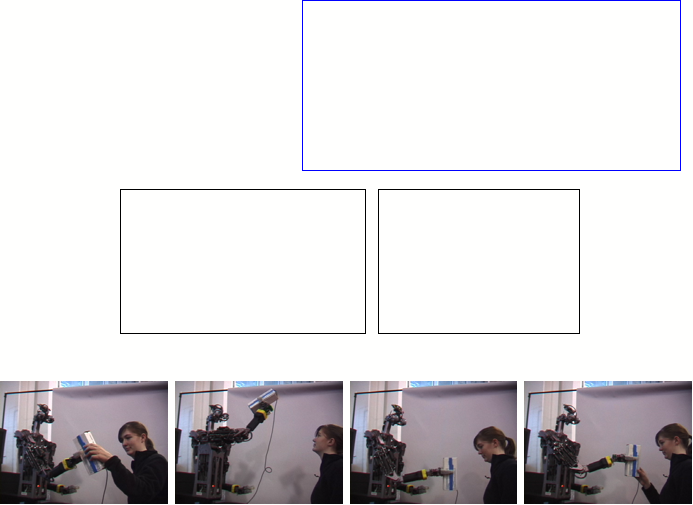
grasp
box
“inspection”
offer
box
release
box
Give and take
experiment
Will people give an object aligned with the robot’s grasp?
Will people take an object when offered by the robot?