OBRERO
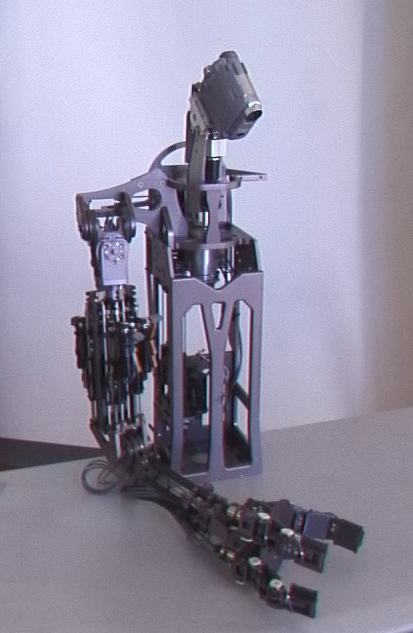
Obrero is a robot especialized in manipulation. It consists of:
Hand:
- 8 force sensors
- 5 position sensors
- 5 motors
- 7 high resolution tactile sensors
Arm
- 6 Degrees of Freedom (6 motors)
- 6 Force sensors
- 6 Angle sensors
Head
- 2 Degrees of Freedom (2 motors)
- Zoom and Focus control