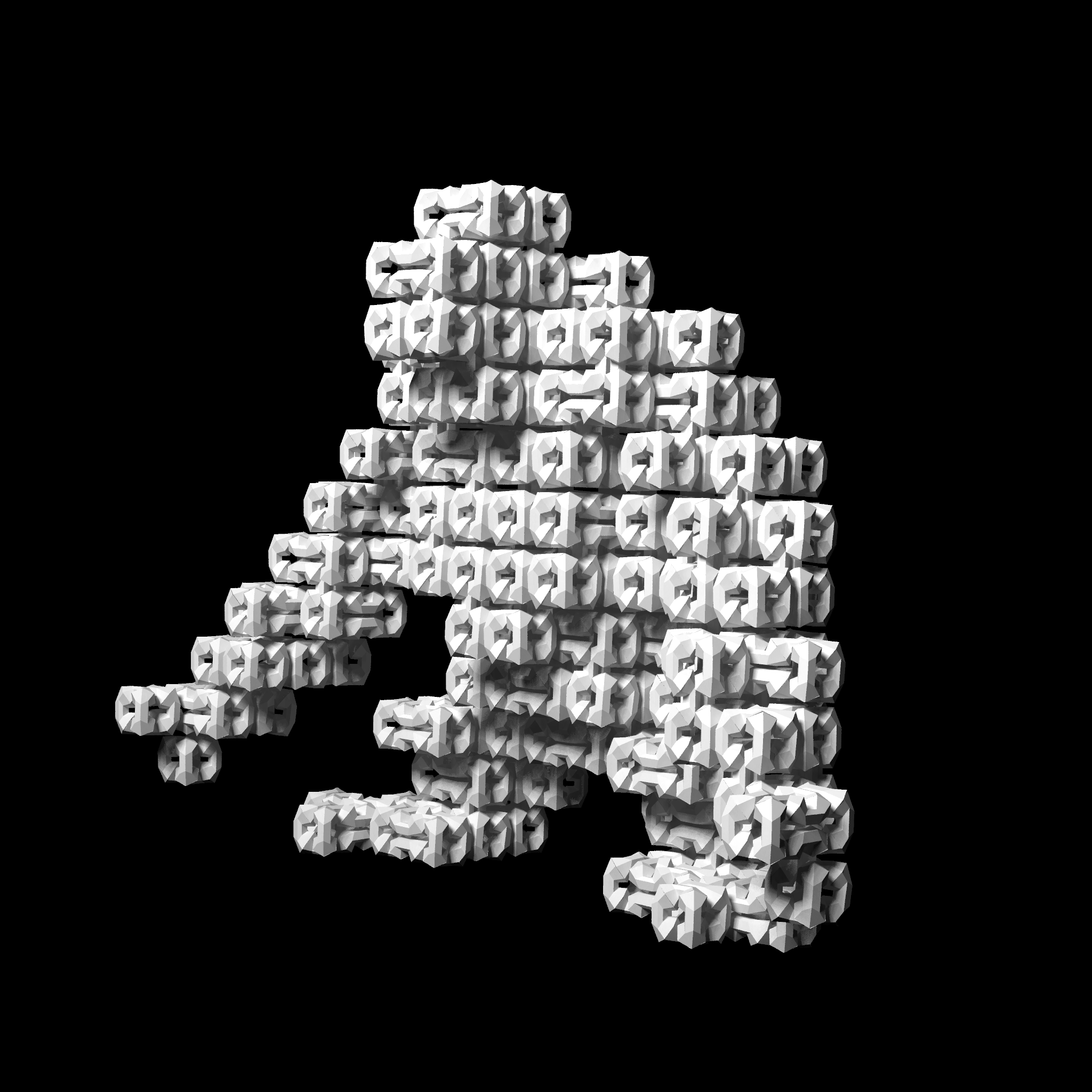
complete tour through gorila using polyhedral chain
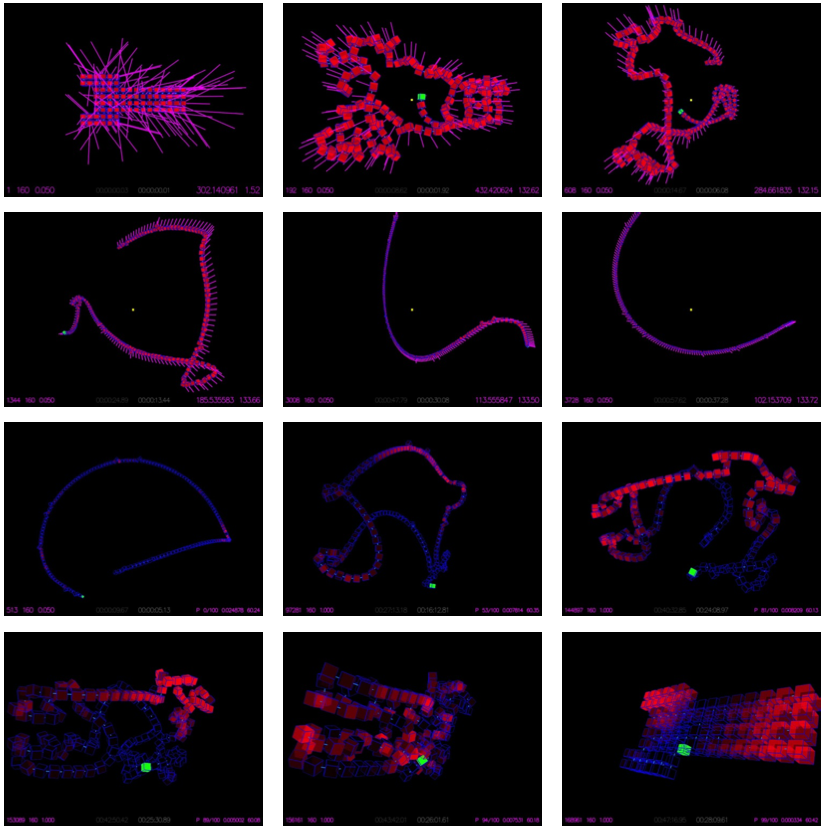
reverse explosion path planning algorithm
| Mechanical Protein Folding | |
| What | Complete end to end workflow for automatic formation of irregular 3D objects using a folding mechanical protein consisting of space filling polyhedra |
| Which | Our robots are composed from multiple space-filling polyhedra, such as cubes interconnected with universal joints and right angle tetrahedra interconnected with hinge joints. Folding chains of hinged polyhedra into arbitrary 3D solids requires that we complete the following two tasks: (1) Take a description of a target solid, for example, in the form of a closed triangular surface mesh and produce a final configuration including target positions for monomers and joint angles for the joints so that the chain forms a Hamiltonian path through the shape; and (2) Plan for folding the monomers from an unfolded configuration into the final configuration. Specific procedures include rasterization of a target 3D shape, generation of a Hamiltonian path that visits all internal voxels of the target shape, along which the chain robot segments will be lined up in the folded configuration, and, finally, design of a folding trajectory for the chain robot. complete tour through gorila using polyhedral chain reverse explosion path planning algorithm |
| Why | Programmable matter baby. |
| Who | Jonathan Bachrach, Saul Griffith, Victor Zykoff |
| How | C++, OpenGL |
| When | 2009-2011 |
| Where | Otherlab |
| And | chain combinatorics |