Abstract:
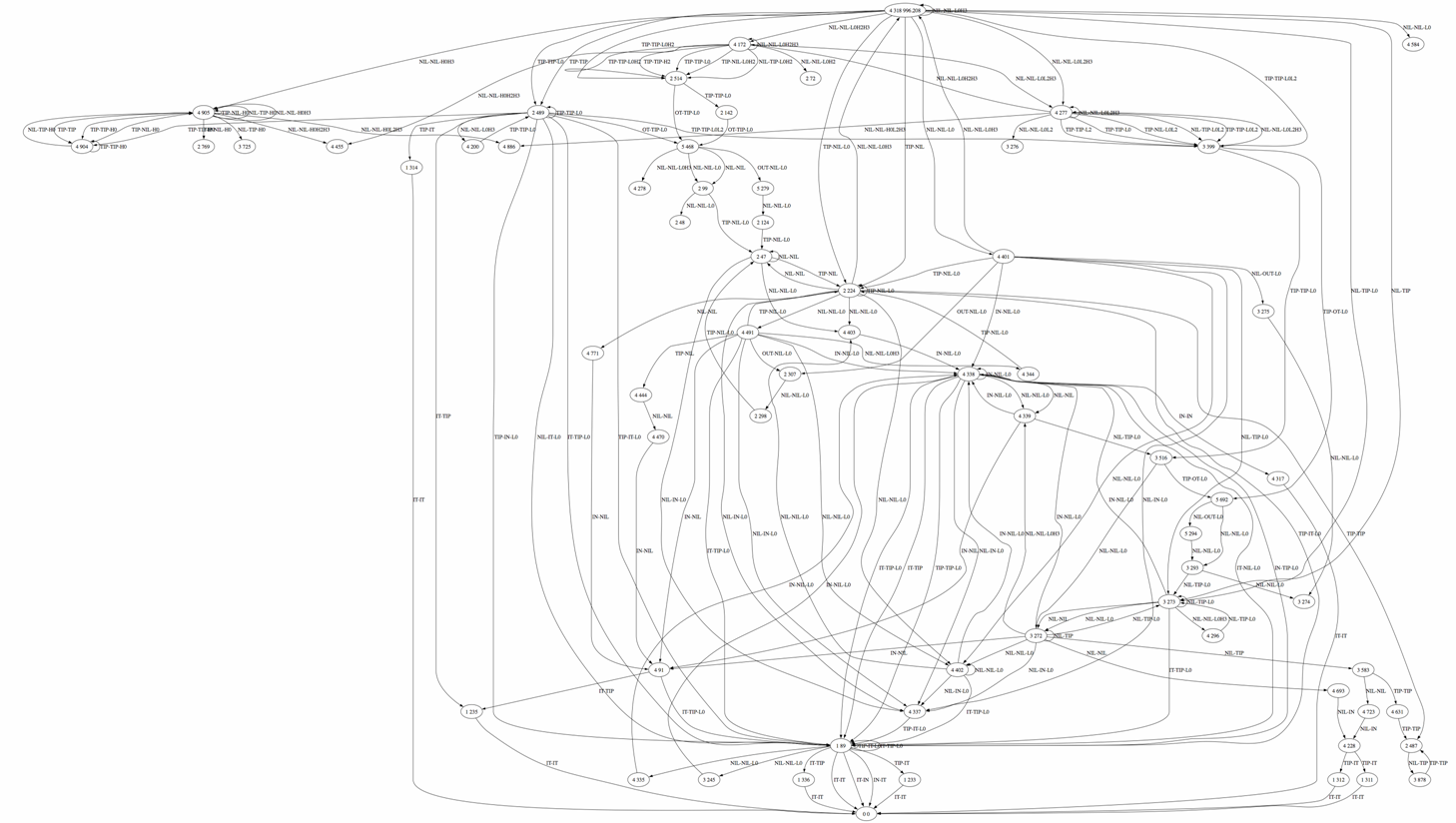
We provide a method for planning under uncertainty
for robotic manipulation by partitioning the configuration
space into a set of regions that are closed under
compliant motions. These regions can be treated as abstract states
in a partially observable Markov decision process (POMDP),
which can be solved to yield optimal control policies under
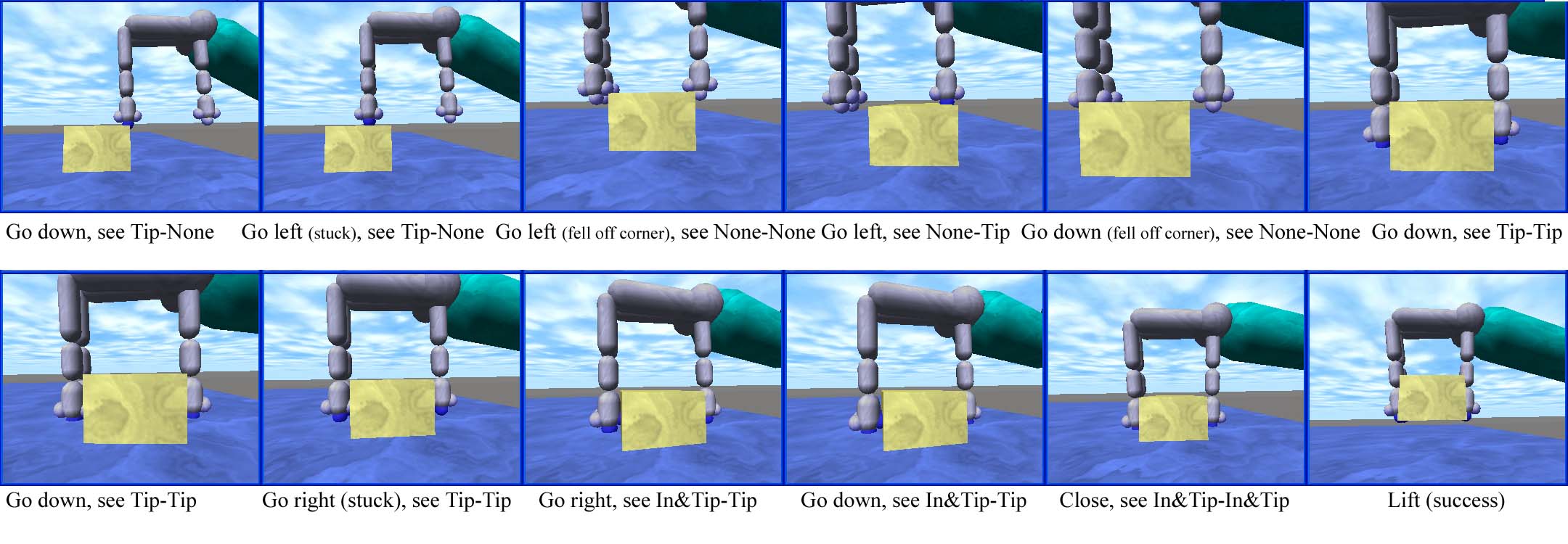
uncertainty. We demonstrate the approach on simple grasping
problems both in simulation and on an actual Barrett Arm, showing
that it can construct highly robust, efficiently
executable solutions.
Papers:
"Grasping POMDPs: Theory and Experiments," Ross Glashan and Kaijen Hsiao and Leslie Pack Kaelbling and Tomas Lozano-Perez, RSS Manipulation Workshop: Sensing and Adapting to the Real World, 2007.
"Grasping POMDPs," Kaijen Hsiao and Leslie Pack Kaelbling and Tomas Lozano-Perez. ICRA, 2007.
More details are provided in Chapter 2 of my thesis.
Videos (simulated robot):
Two fingered grasping of boxes
Two-fingered grasping of stepped blocks
Videos (real Barrett Arm):
Placing one finger relative to a stepped block
Two-fingered grasping of a box