Abstract
Physical products are often complex assemblies combining a multitude of 3D parts modeled in computer-aided design (CAD) software. CAD designers build up these assemblies by aligning individual parts to one another using constraints called joints. In this paper we introduce JoinABLe, a learning-based method that assembles parts together to form joints. JoinABLe uses the weak supervision available in standard parametric CAD files without the help of object class labels or human guidance. Our results show that by making network predictions over a graph representation of solid models we can outperform multiple baseline methods with an accuracy (79.53%) that approaches human performance (80%). Finally, to support future research we release the Fusion 360 Gallery assembly dataset, containing assemblies with rich information on joints, contact surfaces, holes, and the underlying assembly graph structure.
Code 💻
Follow our Github repository JoinABLe

Motivation
Physical products are often complex assemblies combining a multitude of 3D parts modeled in computer-aided design (CAD) software. CAD designers build up these assemblies by aligning individual parts to one another using constraints called joints. JoinABLe is a learning-based method that assembles parts together to form joints. JoinABLe uses the weak supervision available in standard parametric CAD files without the help of object class labels or human guidance. Our results show that by making network predictions over a graph representation of solid models we can outperform multiple baseline methods with an accuracy (79.53%) that approaches human performance (80%).
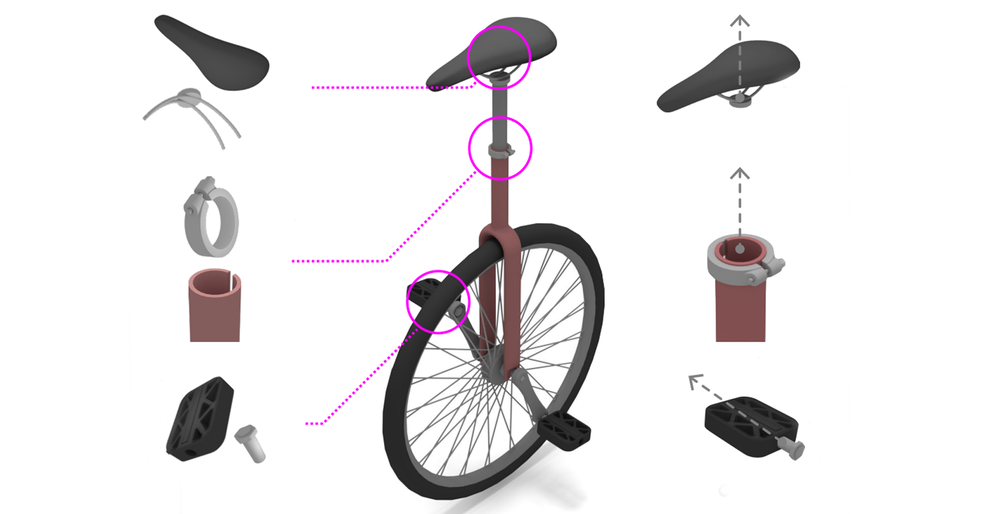
Task
Given a pair of parts, we aim to create a parametric joint between them, such that the two parts are constrained relative to one another with the same joint axis and pose as defined by the ground truth.

Representation
JoinABLe takes as input a pair of parts in the B-Rep format. We represent each part as a graph derived from the B-Rep topology. Graph vertices are either B-Rep faces or edges and graph edges are defined by adjacency.

Architecture
Our overall architecture is shown in the figure below and consists of an encoder module that outputs per-vertex embeddings for each B-Rep face and edge in our graph representation of the input parts. Using these embeddings we can predict a joint axis and then search for joint pose parameters.

Citation
@inproceedings{willis2022joinable,
title = {JoinABLe: Learning Bottom-up Assembly of Parametric CAD Joints},
author = {Willis, Karl DD and Jayaraman, Pradeep Kumar and Chu, Hang and Tian, Yunsheng and Li, Yifei and Grandi, Daniele and Sanghi, Aditya and Tran, Linh and Lambourne, Joseph G and Solar-Lezama, Armando and Matusik, Wojciech},
booktitle = {Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR)},
month = {June},
year = {2022}
}