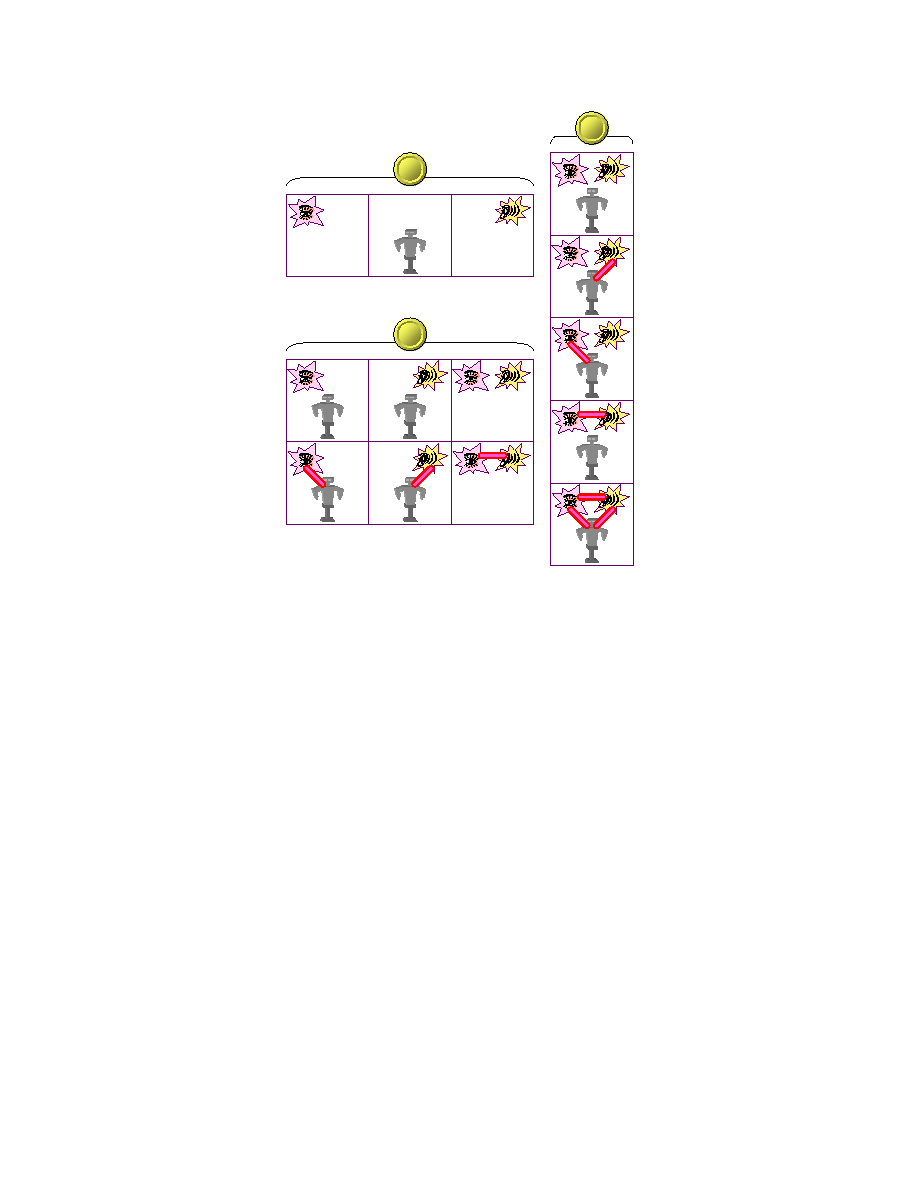
used throughout the paper. Events in any one of the three modalities (sight, proprioception, or hearing) are
indicated as in block 1. When two events occur in different modalities, they may be independent (top of 2)
or bound (bottom of 2). When events occur in three modalities, the possibilities are as shown in 3.
clapping is an event, walking is an event, but the vibration of a violin string is not an event (too fast), and
neither is the daily rise and fall of the sun (too slow). Such a restriction is related to the idea of natural
kinds (Hendriks-Jansen, 1996), where perception is based on the physical dimensions and practical interests
of the observer.
performance when applied to the visual trajectory of periodically moving objects (Arsenio et al., 2003). For
example, Figure 2 shows a hammer segmented visually by tracking and grouping periodically moving points.
However, our experience also leads us to believe that this approach is not ideal for detecting periodicity
of acoustic signals. Of course, acoustic signals have a rich structure around and above the kHz range, for
which the Fourier transform and related transforms are very useful. But detecting gross repetition around
the single Hz range is very different. The sound generated by a moving object can be quite complicated,
since any constraints due to inertia or continuity are much weaker than for the physical trajectory of a mass
moving through space. In our experiments, we find that acoustic signals may vary considerably in amplitude
between repetitions, and that there is significant variability or drift in the length of the periods. These two
properties combine to reduce the efficacy of Fourier analysis. This led us to the development of a more robust
method for periodicity detection, which is now described. In the following discussion, the term signal refers
to some sensor reading or derived measurement, as described at the end of this section. The term period is