|
|
Convex and Combinatorial Optimization for Dynamic Robots in the Real World Russ Tedrake |
|
|
|
|
|
|
|
My motivating applications
| Robots in the home |

|

|
Automous vehicles |
My goals for today
- Discuss some of the big questions
- Do home robots actually need "verification"? (or should be all be working on batteries, or sensors, or actuators ...)
- What are the relevant challenges/technologies for autonomous cars?
- Discuss what dynamic robots can and can't do well
- Describe the optimization problems we formulate and how we solve them
- Expose our "pain points"... and convince you to help!
- Organize around core problems:
- Perception, Planning, Feedback Design, Verification
"Hybrid Systems"
- Not just discrete decisions; also discrete/discontinuous dynamics (e.g. collision events and frictional contact).
- "Language" of hybrid systems (modes, guards, resets, ...) is sufficient...
- ... but often impoverished for synthesis/verification.
- Found happiness in e.g. measure-differential inclusions (MDIs) and mixed combinatorial-continuous optimization
"Hybrid Systems"
- Not just discrete decisions; also discrete/discontinuous dynamics (e.g. collision events and frictional contact).
- Constant theme of "exploiting structure" (especially between modes)
- Nonlinear dynamics: sparsity, convexity, algebraic structure.
- Combinatorial structure (even in the mechanics).
- Approaches: Submodularity/Matroid, SMT, MI-Convex, Convex relaxations, ...
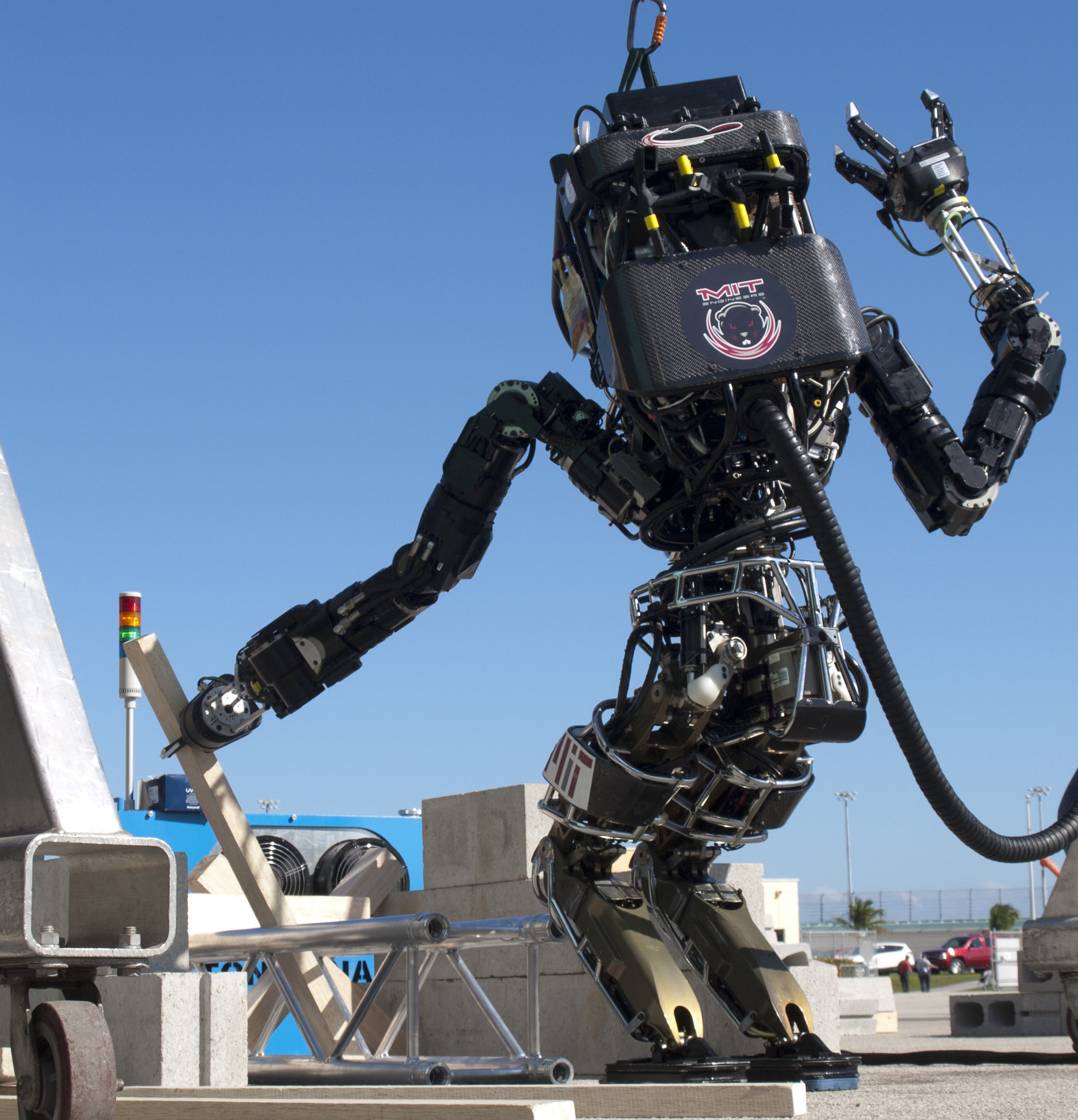
MIT's approach to the DARPA Robotics Challenge
Rules allowed a human operator, but with a degraded network connection

|
|

|
| Teleoperation | Complete Autonomy |
Our approach:
- Focus on autonomy.
- Human operator provides high-level ``clicks'' to seed (nearly) autonomous algorithms
- Almost everything the robot does is formulated as an optimization
- For me personally, a triumph for optimization-based synthesis
Trajectory Motion Planning
Simplest example: Inverse Kinematics
-
Joint positions: $q$
- end effector (rich constraint spec)
- joint limits
- collision avoidance
- "gaze constraints"
- feet stay put
- balance constraints (center of mass)
- ...
(and possibly "infeasible")
Big robot, little car
Kinematic trajectory planning
- Optimize $q(t)$ spline coefficients
- Add constraints through time
(points in contact don't move) - Solve with SQP
(or randomized planning) - Solves in seconds
Dynamic trajectory planning
For more dynamic motions have to add additional constraints ($F=ma$, actuator limits, friction cones, ...)
For smooth dynamical systems, trajectory optimization still works well
Dynamic trajectory planning
For more dynamic motions have to add additional constraints ($F=ma$, actuator limits, friction cones, ...)
For smooth dynamical systems, trajectory optimization still works well
Planning with Contact
- Contact (e.g. foot falls or grasping) adds "complementarity constraints"
- Add nonlinear constraint to SQP:
distance $\times$ force = 0
Planning with Contact
- Contact (e.g. foot falls or grasping) adds "complementarity constraints"
- Add nonlinear constraint to SQP:
distance $\times$ force = 0
- Plans take > 1 minute to compute
- ...and don't always succeed (local minima, numerical issues, ...)
- Did not use in the competition
absolutely awesome! but no planning here (yet)
There is real-world, online planning here:
but do you know why humanoids walk like this?
Constant center of mass (COM) height $\Rightarrow$
- No impact events
- Linear center of mass dynamics
- Standard recipe for humanoid walking:
- plan footsteps/contacts [heuristic]
- plan constant-height CoM (also zero angular momentum) [convex]
- My goal: reliable online planning that
- includes footsteps, contact
- removes CoM / momentum restrictions
Footstep planning

|
Footsteps add a combinatorial aspect to the planning problem:
But there is a continuous portion, too
|
Planning on LittleDog (c. 2008)
Search-based footstep placement
- Chestnutt et al., Veranza et al., Winkler et al., Zucker et al.,...
-
Search over action graph of either
- Footsteps
- Body positions
- Discrete set of reachable footsteps
- No guarantees of completeness
- Adding dynamics made the search harder (more expensive checks)
First step: explicitly enumerate the regions
Mixed-integer convex optimization
- Assignment of contacts to regions adds an "integer constraint":
- Non-convex optimization (always).
- Worst-case complexity is awful. Brute force search.
- "Mixed-integer convex" iff relaxation (ignoring integer constraint) is convex
- Relaxation gives lower bounds $\Rightarrow$ effective branch-and-bound search
- Very efficient commercial solvers.
- return global optimality (to tolerance)
- or "infeasible"
More than a "hybrid system"
- Both AI-style search and "hybrid systems" model promote thinking about every mode as independent.
- Transcription to MI-Convex forces thinking about the relationship between modes.
- Here:
- Always $F=ma$,
- Non-zero force from a region when foot is in contact.
Adding more dynamics
- Still very conservative walking
- Integer variables enabled making/breaking contact
- General case needs to handle angular momentum (but non-convex)

\begin{align}
T = \mathbf{p} \times \mathbf{f} \\
= p_{z}f_{x} - p_{x}f_{z}\\
\end{align}
|
|
Momentum terms are non-convex
|
MI-Convex relaxations of bilinear terms
|
MI-Convex relaxations of bilinear terms
|
Application to a bounding planar quadruped

Application to a bounding planar quadruped

- Three contact regions (bold lines)
Application to a bounding planar quadruped

- Three contact regions (bold lines)
- Three (overlapping) free-space regions (shaded)
Application to a bounding planar quadruped

- Three contact regions (bold lines)
- Three (overlapping) free-space regions (shaded)
Application to a bounding planar quadruped

- Three contact regions (bold lines)
- Three (overlapping) free-space regions (shaded)
Application to a bounding planar quadruped
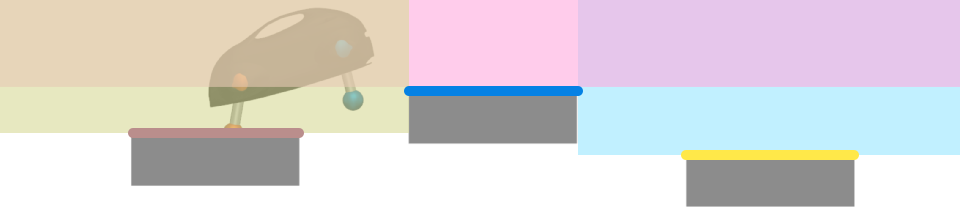
- Assignment to regions provides (convex) constraints for position and force
Application to a bounding planar quadruped
From MICP results to whole-body planning
- Optimization on simple models can seed non-convex optimization
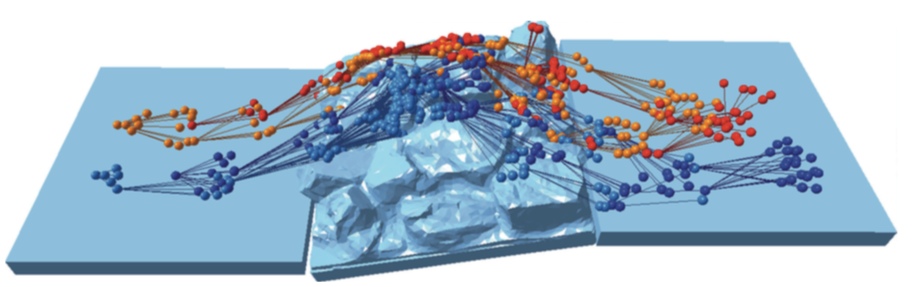
Grasp optimization
- Optimize forces and
contact positions for
robustness - Non-convex from torque (cross product) + assignment of fingers to regions
- Bilinear Matrix Inequalities (BMIs), solved as SDP w/ rank-minimization
- Include kinematic and dynamic constraints (solves inverse kinematics, too)

|
|
Grasp optimization
- Optimize forces and
contact positions for
robustness - Non-convex from torque (cross product) + assignment of fingers to regions
- Bilinear Matrix Inequalities (BMIs), solved as SDP w/ rank-minimization
- Include kinematic and dynamic constraints (solves inverse kinematics, too)
Grasp optimization
- Find pose to maximize wrench disturbance given torque limits
Feedback Control
Example: Whole-Body Force Control

- Planners give desired CoM + end effector trajectories
- Solve differential Riccati equation for approximate CoM feedback
- One-step control Lyapunov function accounts for:
- whole-body inverse dynamics
- instantaneous contact constraints (incl. friction limits)
- torque limits
- results in a sparse QP
Whole-Body Force Control
- Balance control worked extremely well...
Whole-Body Force Control
- Balance control worked extremely well...
Whole-Body Force Control
- Balance control worked extremely well...
Whole-Body Force Control
- Balance control worked extremely well...
- ... except for the one time it didn't
What went wrong?
- First, a human-error
- Then tailbone hit the seat and feet came off the ground...
- No contact sensor in the butt
- Dynamics model very wrong
- State estimator very confused
- Controller is done!
This was a "corner case"
- Errant process sending commands to the ankle
- Particularly unfortunate ankle command
- When robot was most vulnerable
- Never saw this during testing
Ironically
- For flat terrain, we did work out good heuristics...
Ironically
- For flat terrain, we did work out good heuristics...
Another form of robustness
Feedback for Grasping
- Grasping was open-loop (no feedback)
Feedback for Grasping
- Grasping was open-loop (no feedback)
- Touch sensors / hand cameras were fragile and difficult to use
Feedback for Grasping
- Have been trying to extend grasp optimization to feedback design
- Adds sums-of-squares constraints
- Still numerically bad. No success here, yet.
|
|
|
Perception
Continuous walking with dense stereo
Perception for Walking
- In the competition, relied on lidar; local "fitting" via least squares was sufficient
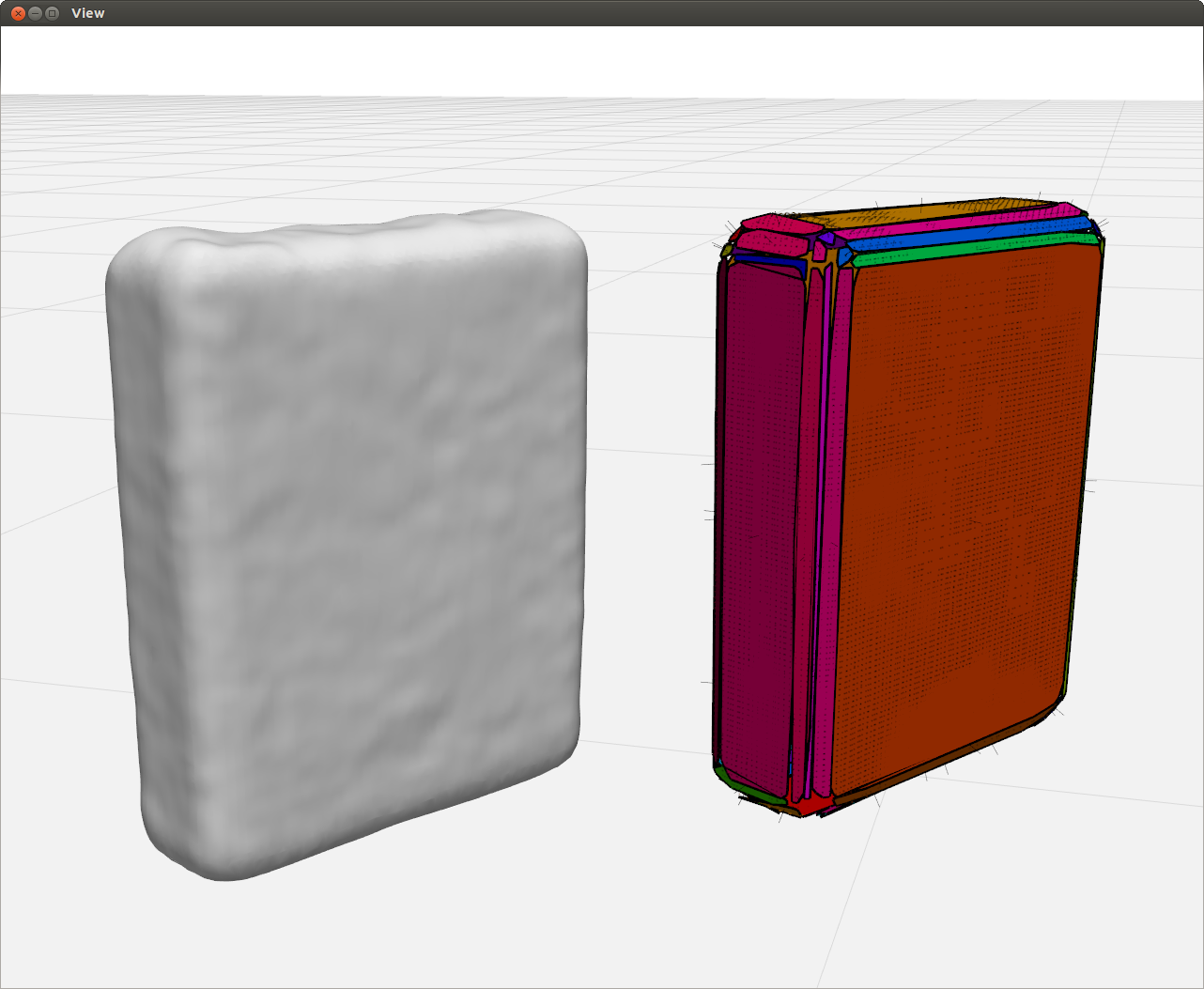
Perception for multi-contact planning
Perception for multi-contact planning
also manipulation of unknown objects

|
|
- In the DRC, we only touched known objects (cinderblocks, drill, ...)
- Fit CAD models to raw sensor data
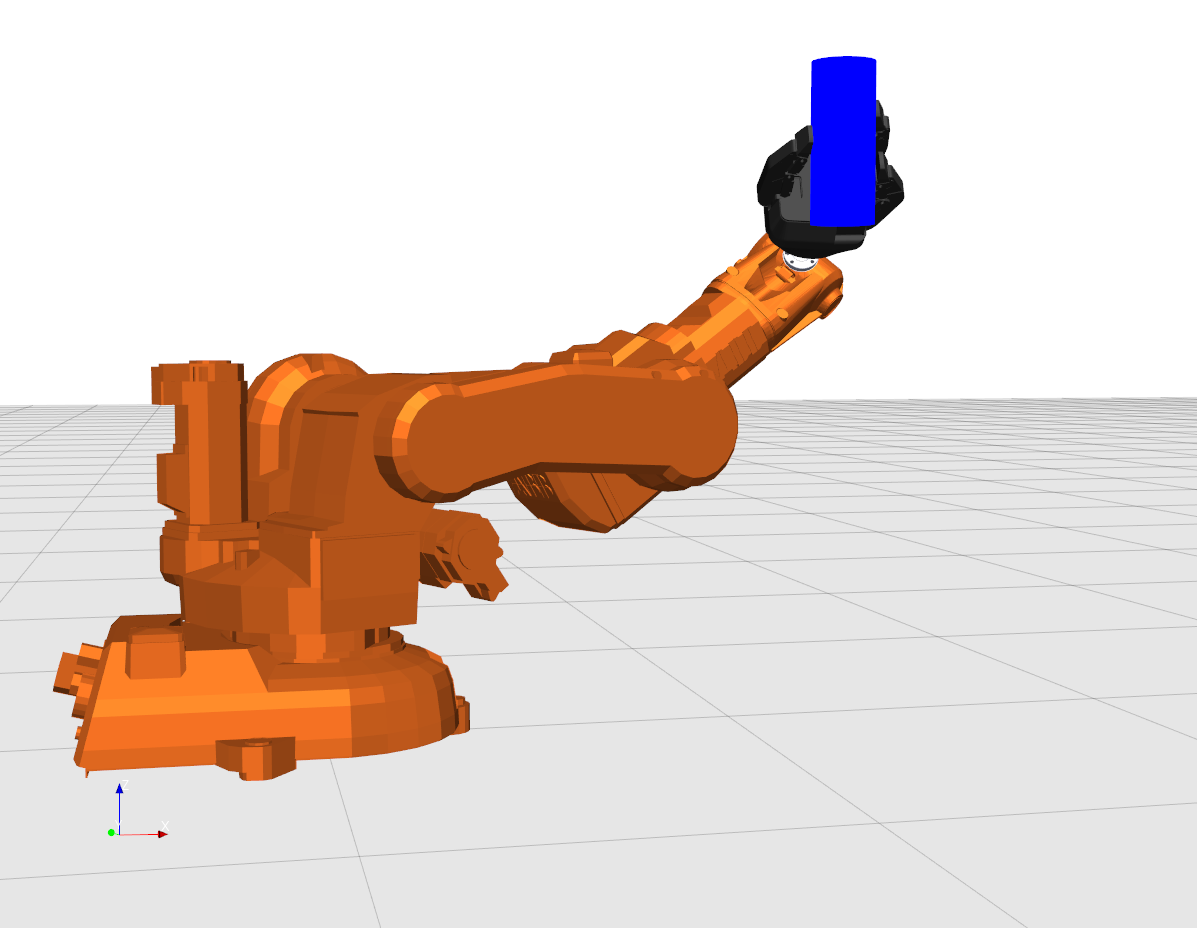
Perception for Manipulation
- Avoided object recognition via a few clicks from the human
Perception for Manipulation
- Avoided object recognition via a few clicks from the human
Robust Synthesis/Verification
- Two (related) ideas:
- Reduce sensitivity of components to expected disturbances (e.g. $L_2$-gain minimization, robust control).
- System-level search for logical corner cases (e.g. formal methods).
complex robot dynamics
(dynamics of vehicles are simpler than humanoids)
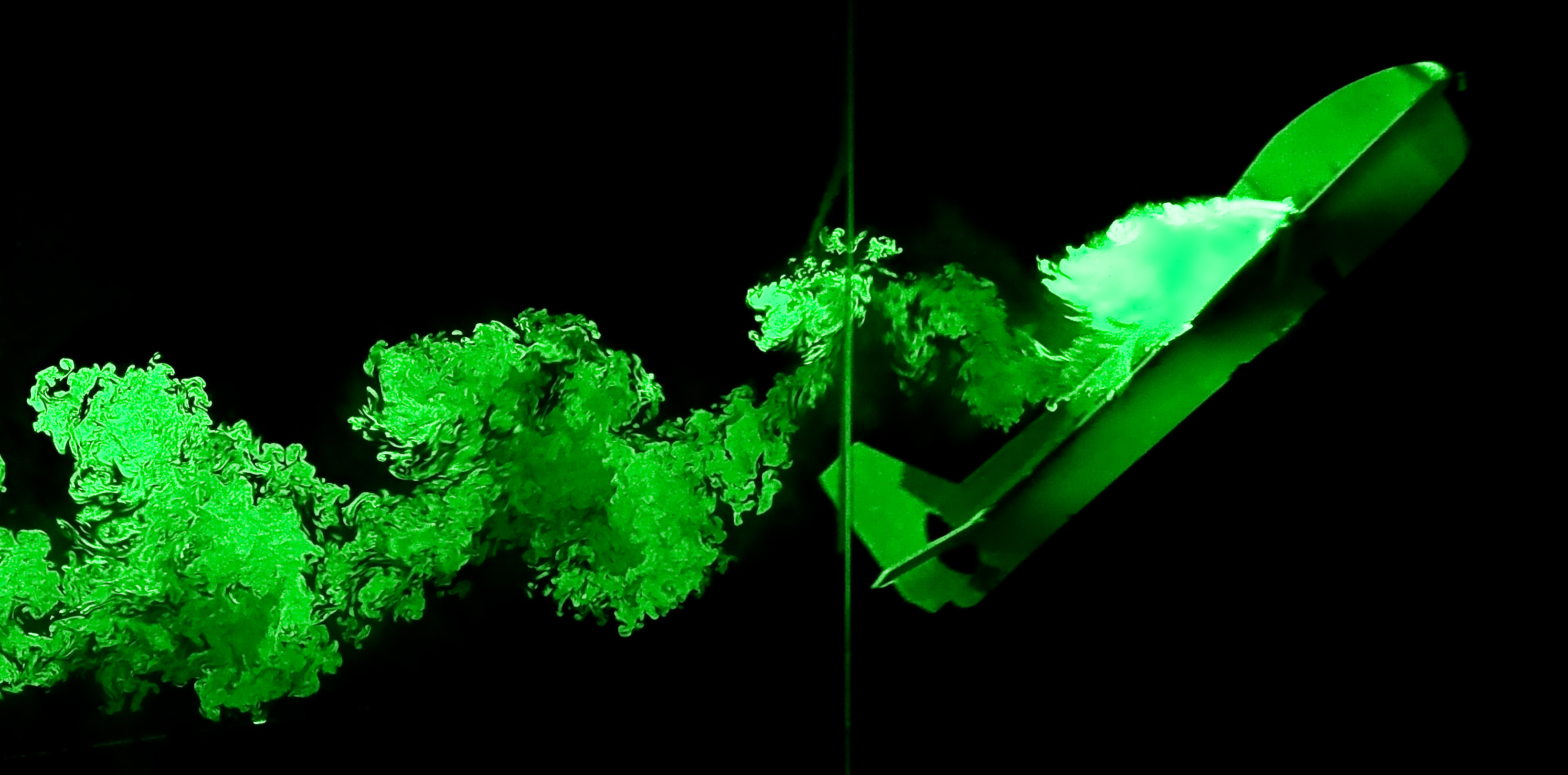
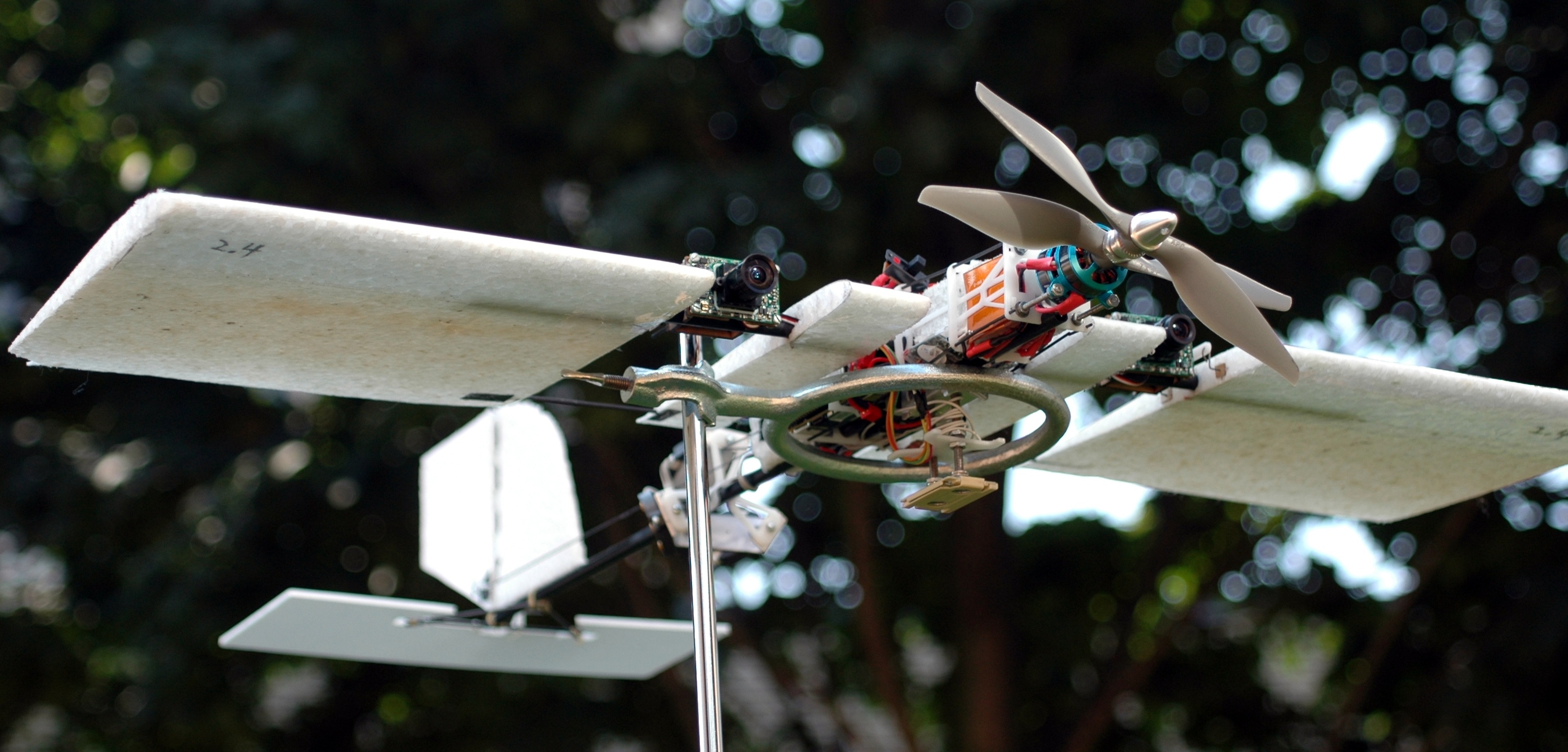
Example: An airplane that can land on a perch
Can we make a control system for a fixed-wing airplane to land on a perch like a bird?

Glider Perching Experiment
|
|
Robust planning and control
-
Key ingredient: Reason algebraically about
nonlinear system dynamics
- Motion planning focuses on a single trajectory (one solution)
- Robust analysis reasons about all possible solutions
Analysis by searching for a Lyapunov function.
Computing Lyapunov functions
- Historically difficult to find Lyapunov functions
- First observation:
- Second observation: The dynamics of my robots are (rational) polynomial
- "Sums-of-Squares" (SOS) optimization can approximate positivity as a semidefinite constraint
- Verifying a candidate Lyapunov function is a convex optimization
- Robust control design using Lyapunov functions is a bilinear optimization
Verifying Lyapunov conditions requires checking positivity of functions $(V(x)>0, \dot{V}(x) < 0)$
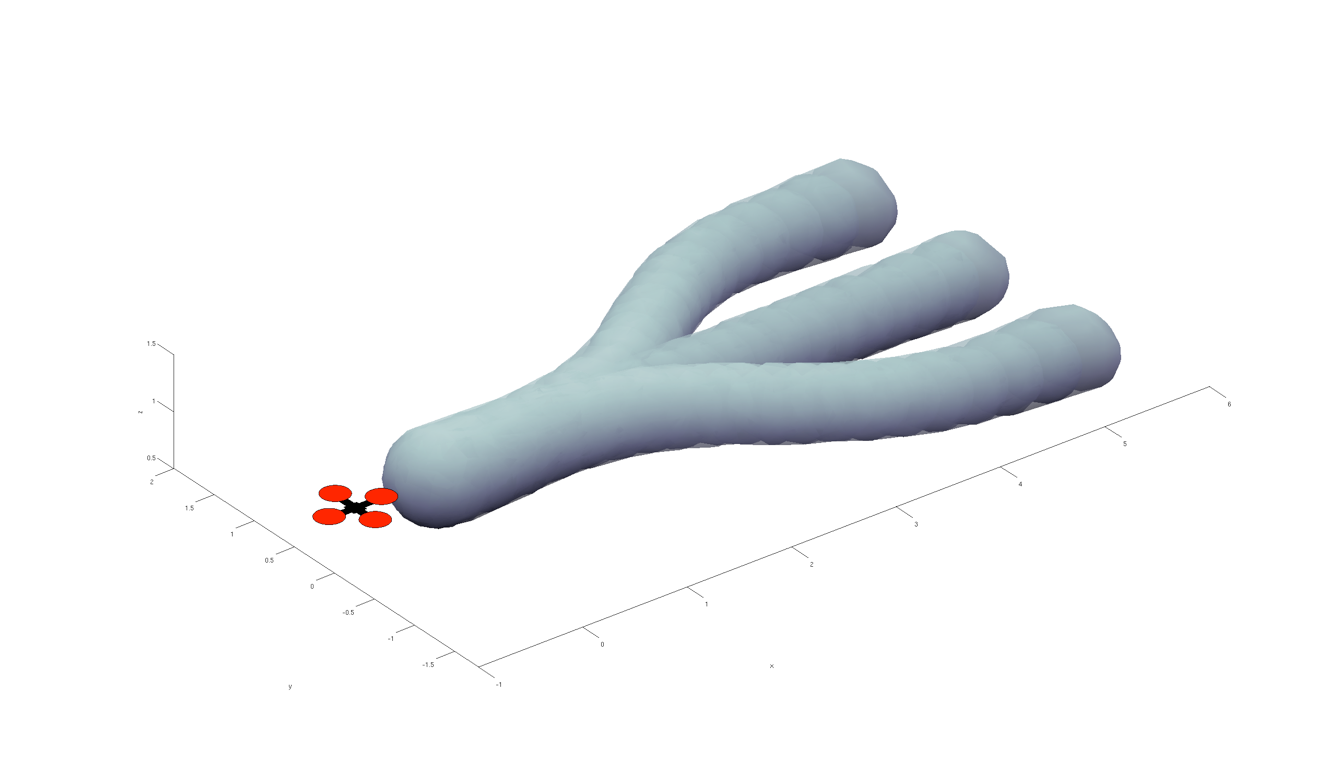
Example: Region of attraction for a Quadrotor

|
|
Lyapunov verification of (aggressive) motion plans
- 7+ dimensional state space
- Exhaustive evaluation is impossible
Flying through forests

Flying through forests

Real-time planning w/ funnels
- Real-time Sums-of-Squares?
- Precompute library of parameterized funnels
- Shift/compose funnels at runtime
What if obstacles aren't known until runtime?
|

|
Outdoor experiments using 120 fps onboard vision
|
|
|


- Logistics: corner cases mean human intervention, loss of efficiency
- Home robots: "artificial stupidity" will limit consumers' appetite
- Autonomous vehicles: corner cases will cost human lives
But why do robots really need "verification"?
To accelerate the pace of innovation.
It takes time to find the corner cases

source: A Statistical Analysis of Commercial Aviation Accidents 1958-2015, Airbus.
- Challenge: Increasing system complexity
- Sensors (camera, lidar, radar, projected light...)
- Dynamics (contact mechanics, tire models, ...)
- Software (perception, planning, learning in the loop)
- Complexity of the environment (with humans)
- How do you provide test coverage of every home in the U.S.?
- ... and every possible human interaction?
Data is precious

I'm taking a different approach
- Open-source C++ toolbox for model-based optimization (http://drake.mit.edu)
- Simulate very complex dynamics, sensors, ... plus tools for
- System identification
- Runtime monitoring / anomaly detection
- Active experiment design
- Built for optimization-based design/analysis
- Cloud simulation (e.g. for black-box approaches)
- Provides analytical gradients, sparsity, polynomials, ...
- Bindings to MATLAB, Python, Julia, ...
- Clear separation between problem formulations and solvers
- Toyota Research Institute + other industry investment
- Very interested in robustness / verification
- Immediate applications
Rigorous Simulation
Rigorous Simulation (on the cloud)
Specific technical challenges
- Robust design/analysis through contact
- Current controllers have "obvious" deficiencies w/ respect to contact uncertainty.
- Robust perception
- Really feedback systems with perception in the loop.
- Don't even have the robustness metric yet (e.g. input-output gain less important than outlier rejection)
- Robust design/analysis w/ humans in the loop.
- Modeling is the key challenge.
Robustness design/analysis through contact
Combinatorial number of contact conditions
Robust synthesis/analysis through contact


Robust design/analysis with humans in the loop
Building large-scale traffic models (+ sensor models) in drake.

|
Work with Jon DeCastro and Soonho Kong (in the audience).
Emerging themes:
- Falsification, not verification
- Falsification alone is too easy (adversarial vehicles will get you).
- Need good models, return highest probability failures until satisfied
Summary
- Planning
- Mostly nonlinear optimization
- New results getting more dynamics into mi-convex formulations
- (Low-level) Perception
- Was about appearance. Now about geometry.
- Mostly simple (unconstrained) optimization, with randomized restarts
- Essentially no guarantees. Still not robust
- Feedback/Verification
- One-step control-Lyapunov as a QP, effective but limited
- SOS verification/synthesis works well for smooth systems, even aggressive motion
- SOS through contact still numerically difficult
Summary
model-based design/analysis to accelerate pace of iteration.
falsification can give value immediately.
Summary
in a language that can expose their structure
with SMT, SDP, submodular/matroid methods, mi-convex, ...).
For more information
- Software available at: http://drake.mit.edu
- Online course (edX): http://tiny.cc/mitx-underactuated
|
|