Deep Rigid Instance Scene Flow
3University of Toronto
Abstract
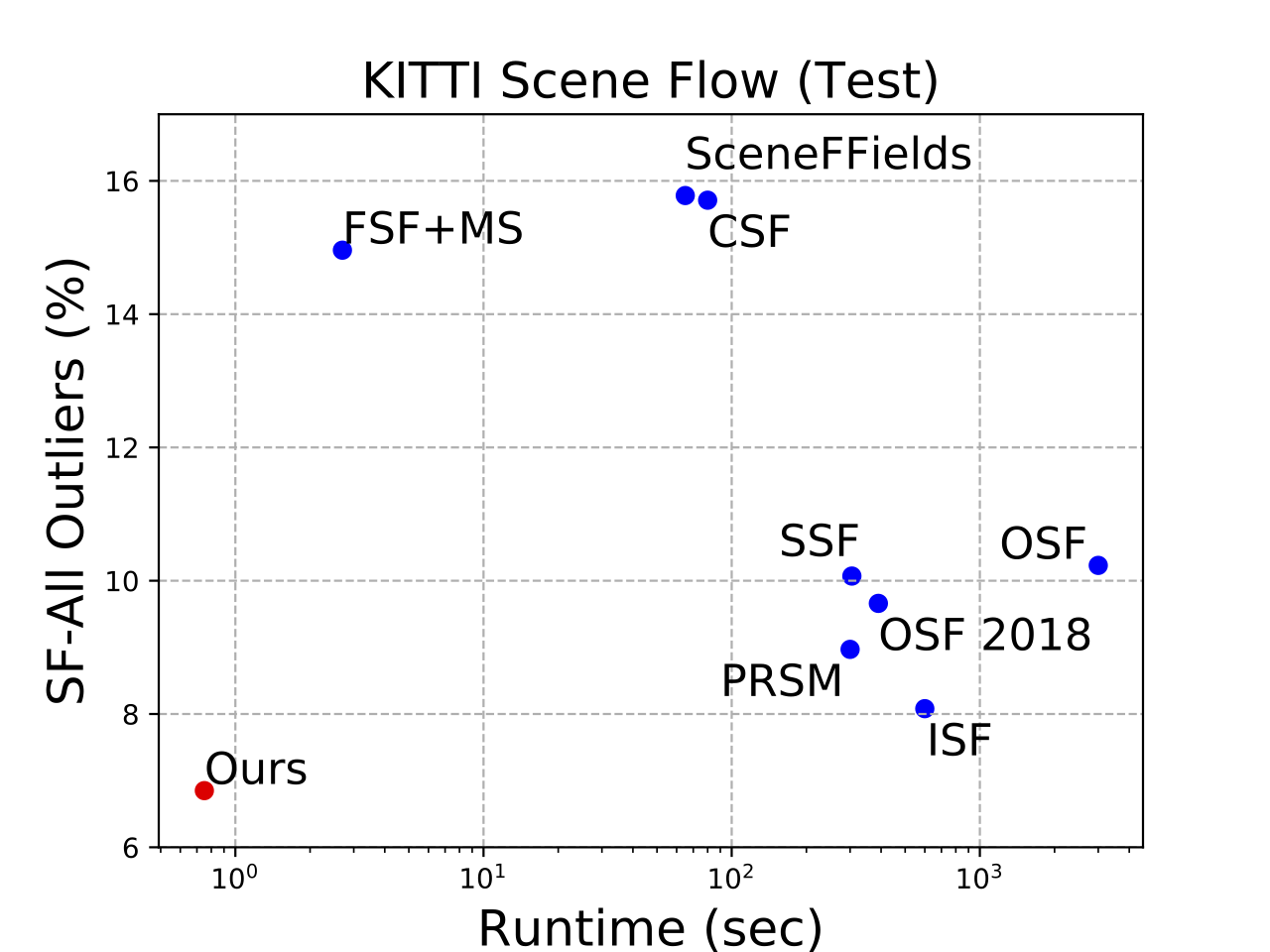
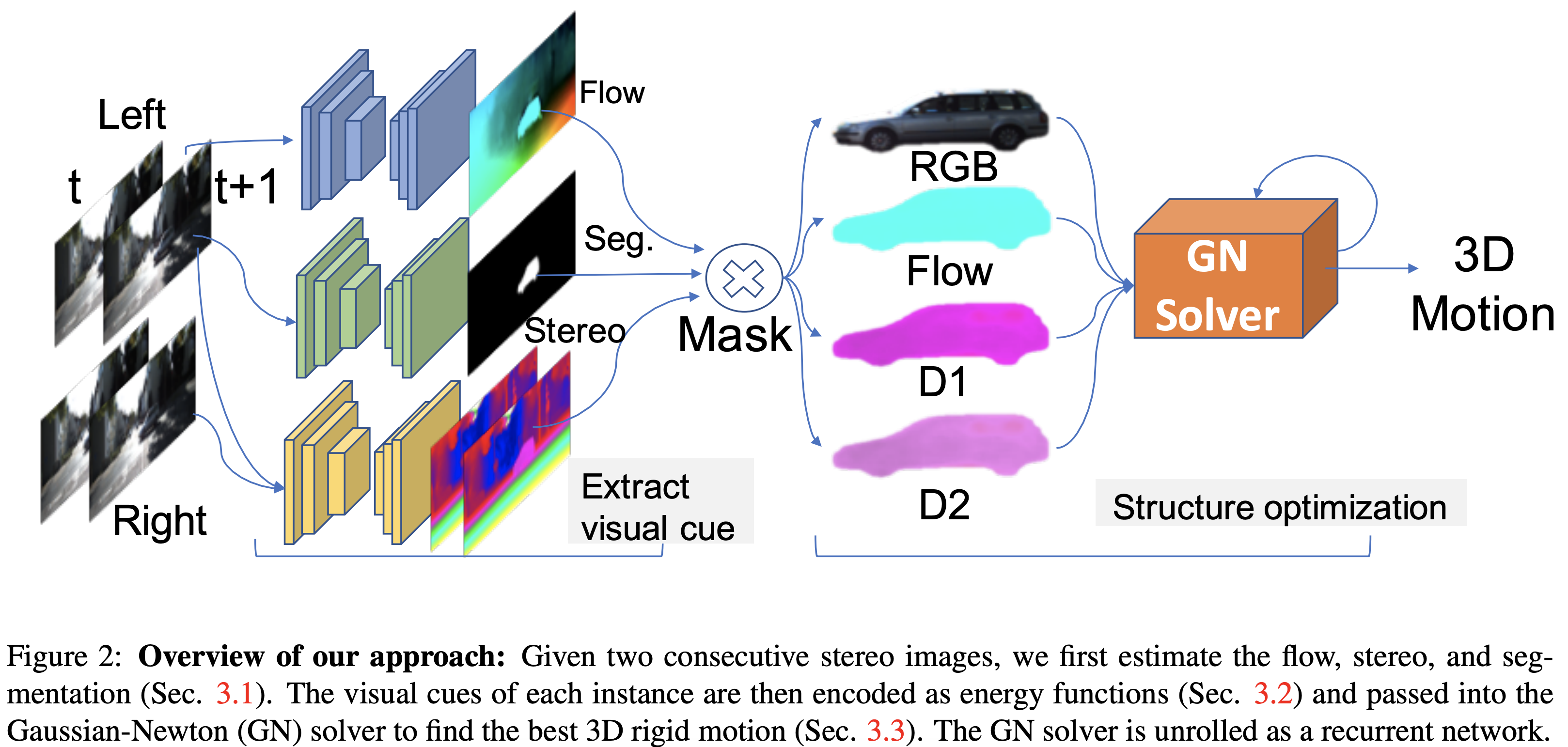
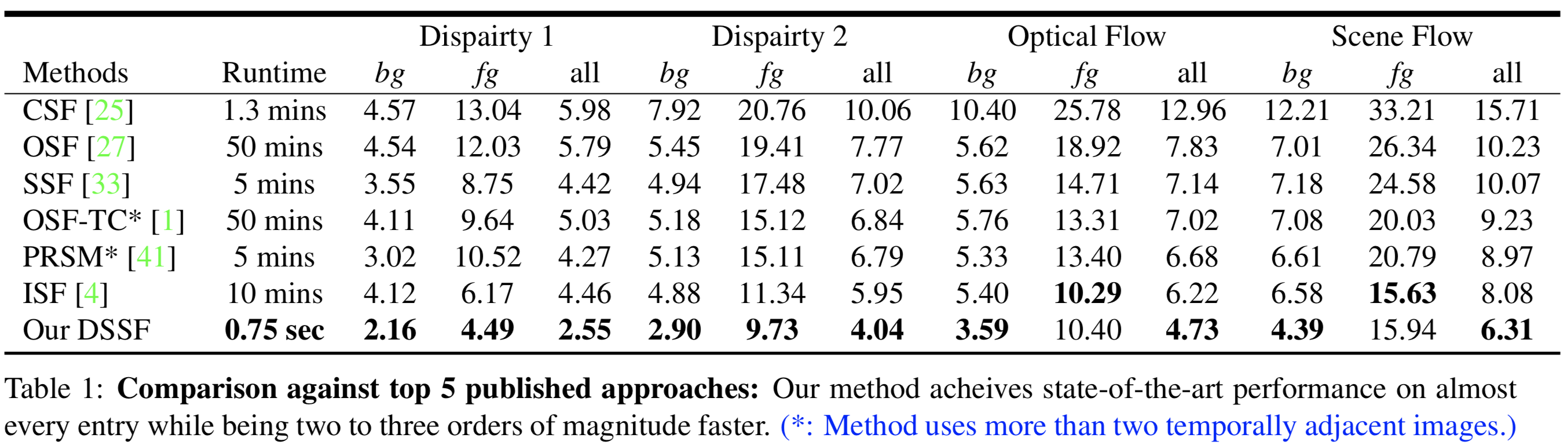
In this paper we tackle the problem of scene flow estimation in the context of self-driving. We leverage deep learning techniques as well as strong priors as in our application domain the motion of the scene can be composed by the motion of the robot and the 3D motion of the actors in the scene. We formulate the problem as energy minimization in a deep structured model, which can be solved efficiently in the GPU by unrolling a Gaussian-Newton solver. Our experiments in the challenging KITTI scene flow dataset show that we outperform the state-of-the-art by a very large margin, while being 800 times faster.
Overview of our approach
Comparison against previous approaches
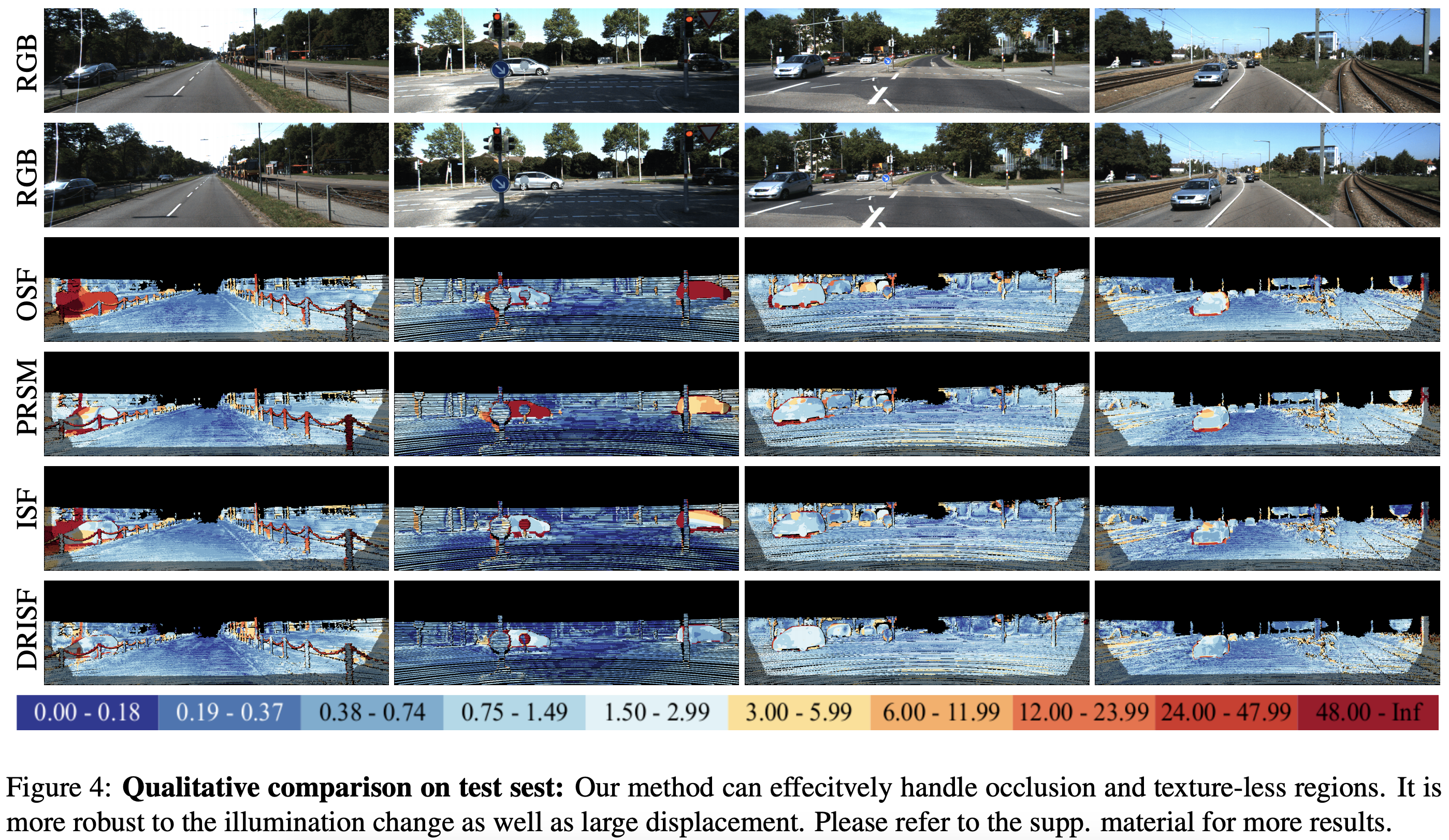
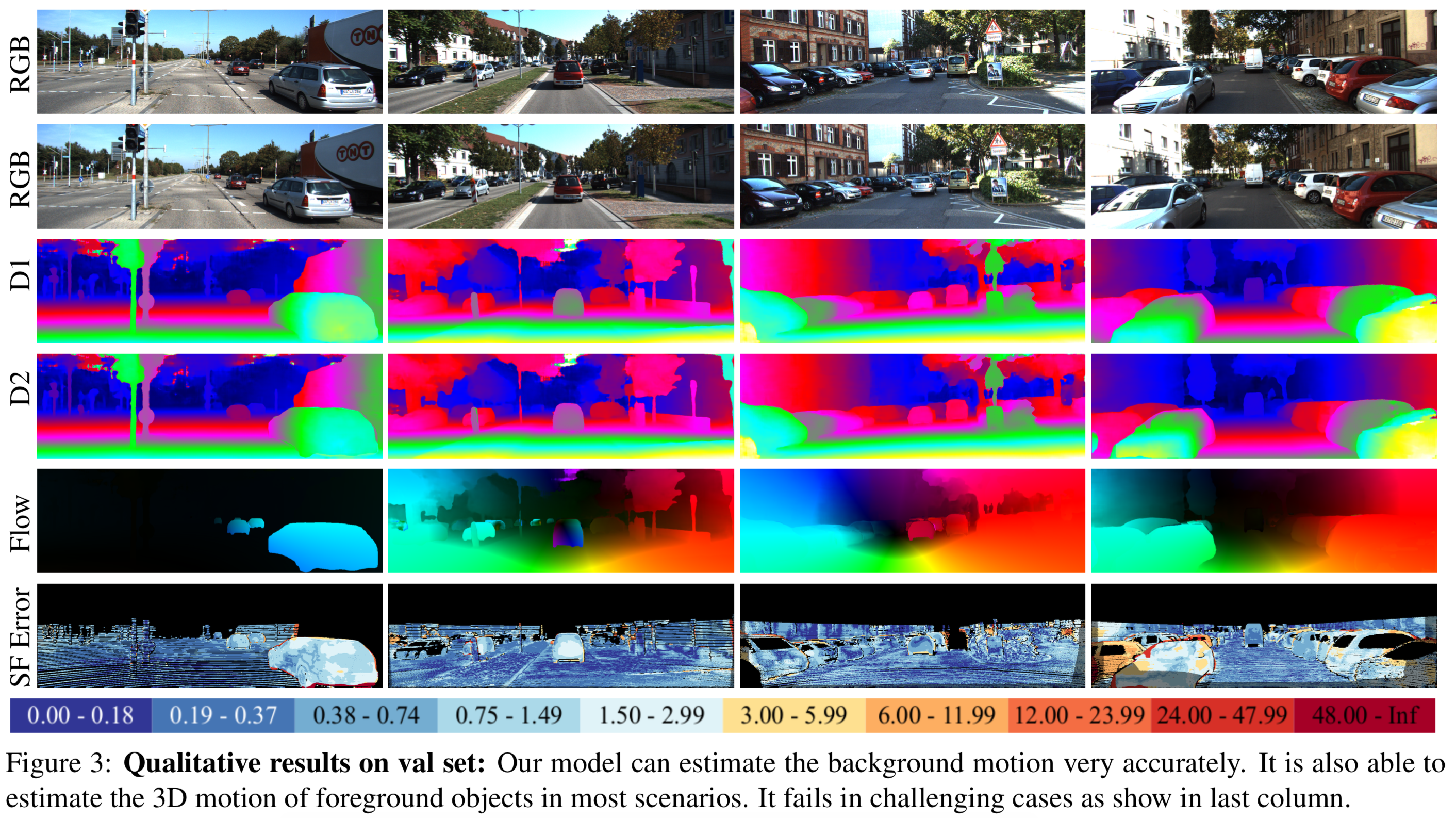
Qualitative results
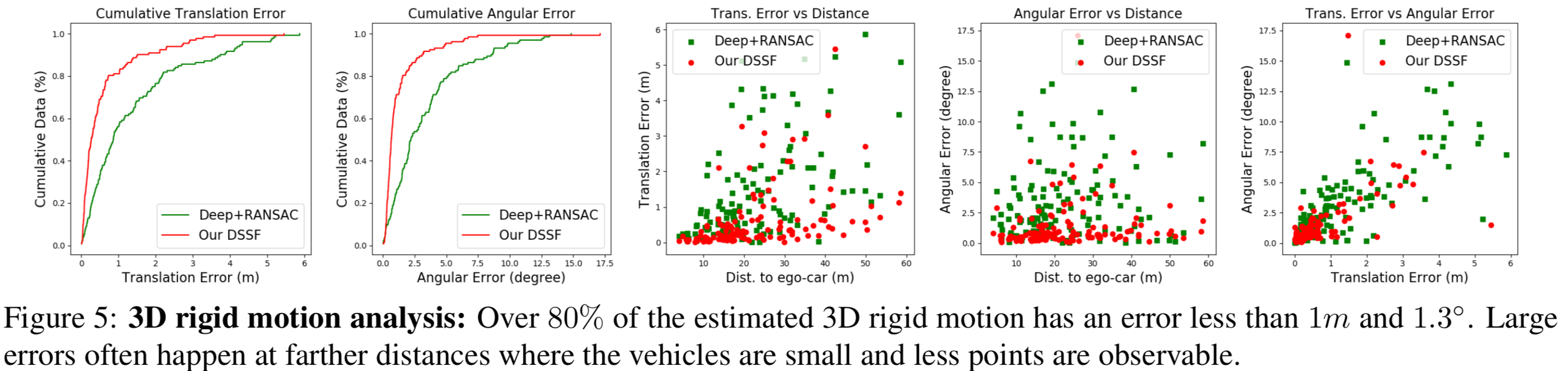
3D rigid motion analysis
Effects of Gaussian Newton Solver
Publications

Uncompressed paper + supplementary material (link)
arXiv preprint (link)
BibTex
title={Deep Rigid Instance Scene Flow},
author={Ma, Wei-Chiu and Wang, Shenlong and Hu, Rui and Xiong, Yuwen and Urtasun, Raquel},
booktitle={IEEE Conference on Computer Vision and Pattern Recognition ({CVPR})},
year={2019}
}
Related work
Sun et al. "PWC-Net: CNNs for Optical Flow Using Pyramid, Warping, and Cost Volume", CVPR 2018.
Chang and Chen. "Pyramid Stereo Matching Network", CVPR 2018.
Behl et al. "Bounding boxes, segmentations and object coordinates: How important is recognition for 3d scene flow estimation in autonomous driving scenarios?", ICCV 2017.
Ren et al. "Cascaded Scene Flow Prediction using Semantic Segmentation", 3DV 2017.
Menze and Geiger. "Object Scene Flow for Autonomous Vehicles", CVPR 2015.
Vogel et al. "3D Scene Flow Estimation with a Piecewise Rigid Scene Model", IJCV 2015.