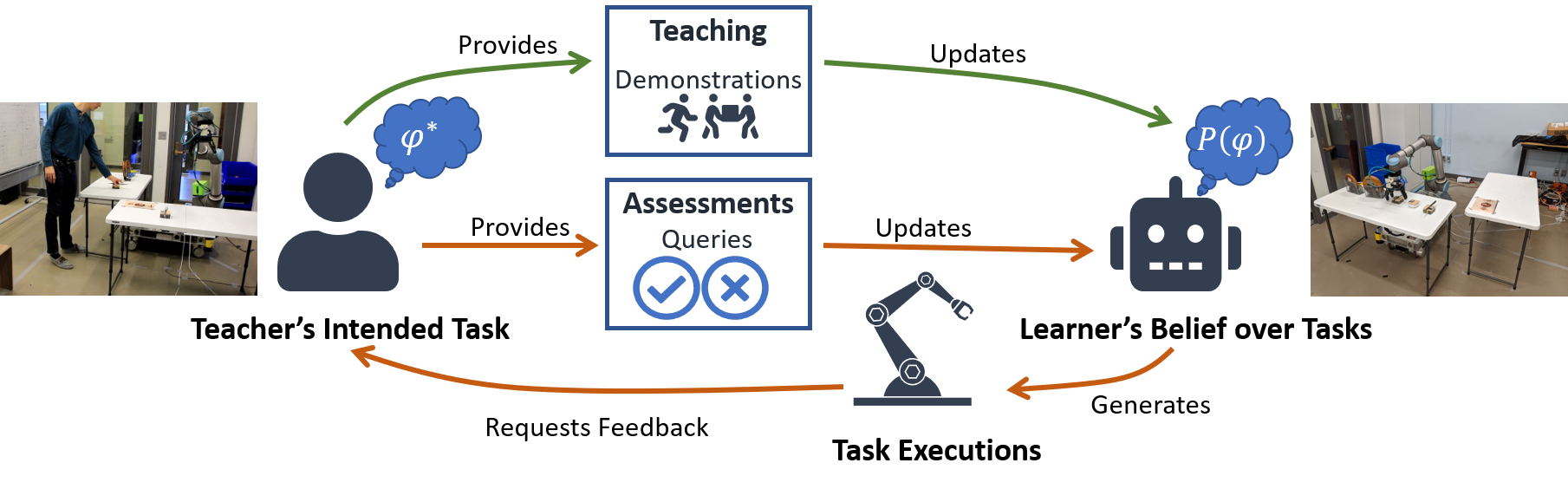
Defining sound and complete specifications for robots using formal languages is challenging, while learning formal specifications directly from demonstrations can lead to over-constrained task policies. We developed a Bayesian interactive robot training framework that allows the robot to learn from both demonstrations provided by a teacher, and that teacher’s assessments of the robot’s task executions. The key is to use an active learning approach, inspired by uncertainty sampling, to identify the most uncertain task execution. We demonstrated our approach through a user study involving both in person demonstrations and robot telecommand over the internet.