Computationally Efficient Bidirectional RRT*
Jordan, M., Perez, A.,
“Optimal Bidirectional Rapidly-Exploring
Random Trees,”
[CSAIL Tech Report MIT-CSAIL-TR-2013-021][Bibtex]
Experimental Results
Numerical Results
All results are computed from 100 runs of 800 iterations. These are presented as follows,
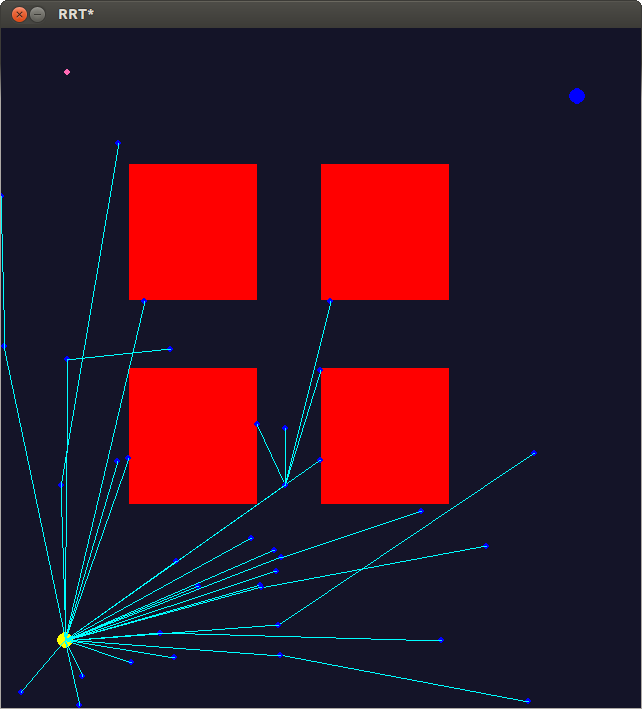
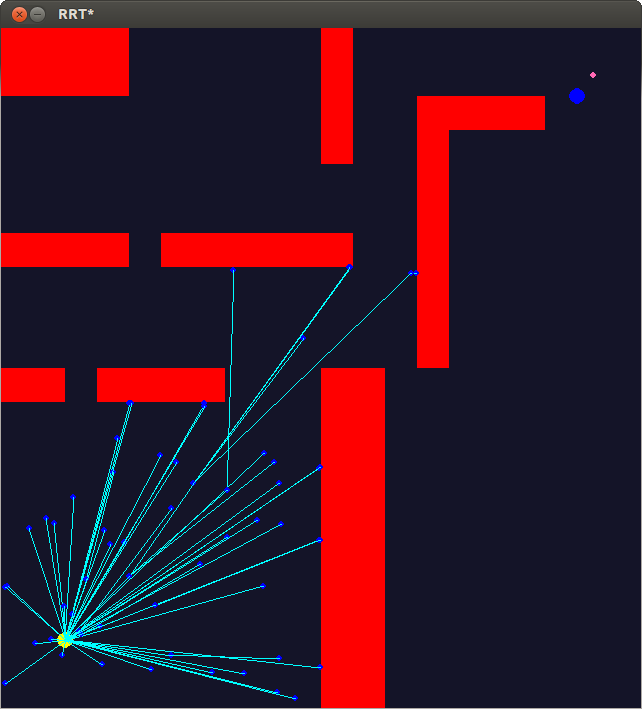
Image: 2D environment, obstacles are red and free space is black.
Costs: Solution cost as a function of iteration averaged over all runs.
Times: Average completion time for 800 iterations, vertical bars indicate standard deviation.
Collision Checking Procedures: Number of queries to the collision checker for 800 iterations averaged over all runs.
Algorithms:
RRT: Rapidly-exploring Random Tree
BiRRT: RRTConnect
BiRRTbnb: RRTConnect (no termination condition and branch-and-bound)
vRRT*: Vanilla RRT* (no heuristics)
vBiRRT*: Vanilla Bidirectional RRT* (no heuristics)
BiRRT*: Bidirectional RRT* with proposed heuristics
RRT*: RRT* with proposed heuristics
2D Environment 1
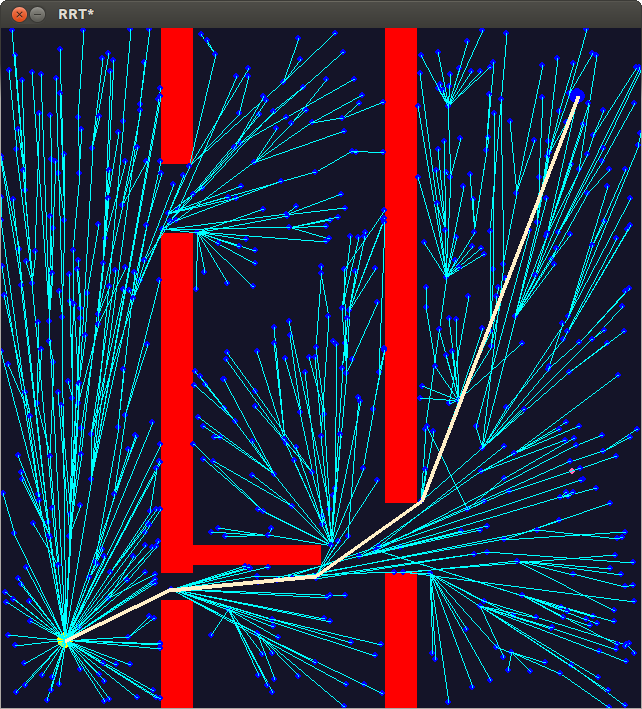
[Image][Costs][Times][Collision Checking Procedures]
2D Environment 2

[Image][Costs][Times][Collision Checking Procedures]
2D Environment 3
[Image][Costs][Times][Collision Checking Procedures]
2D Environment 4
[Image][Costs][Times][Collision Checking Procedures]