Provably Safe Robot Navigation with Obstacle Uncertainty
RSS 2017
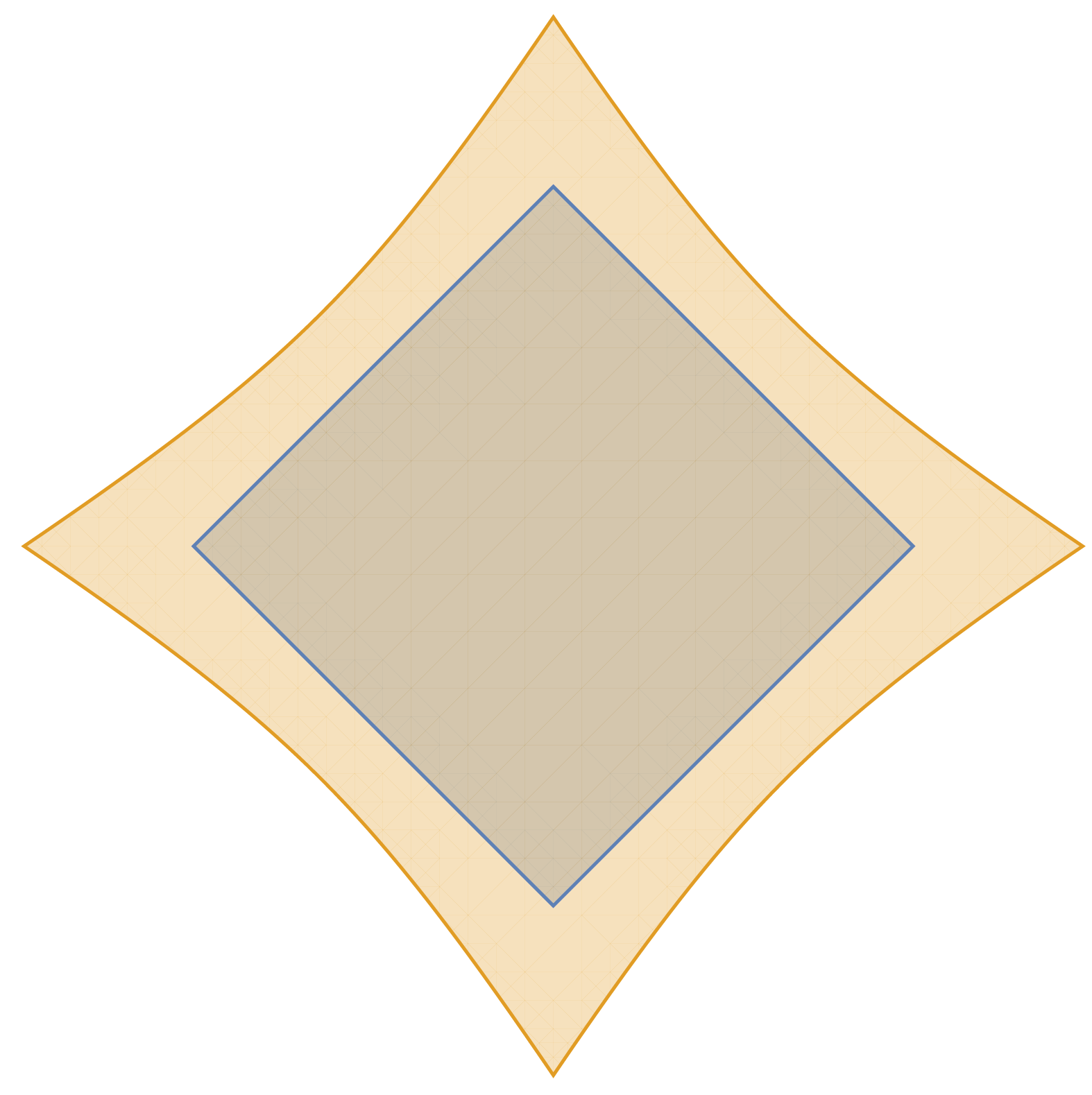
This work examines how to bound random geometry. It shows how to compute confidance intervals for shapes and applies it to planning under uncertainty.
View PDF
This work examines how to bound random geometry. It shows how to compute confidance intervals for shapes and applies it to planning under uncertainty.
View PDF
This work examines common computer vision operations and aims to bridge the gap between the time complexity of state of the art CPU algorithms resource compl...
View PDFAn explanation of how to derive a simple constant-acceleration controller. This was originally written up for my little brother to help him design controller...