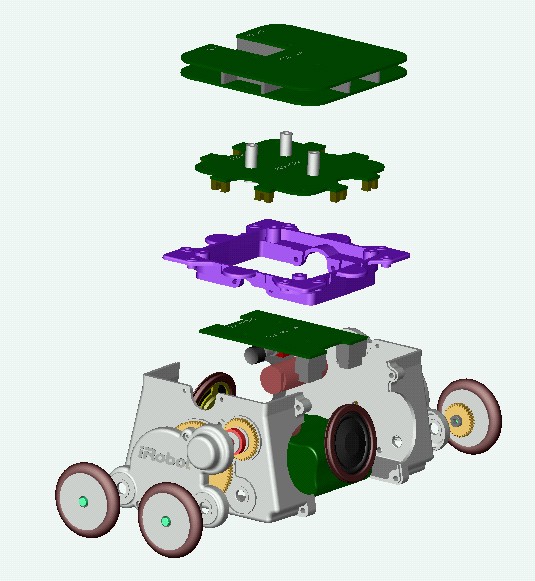
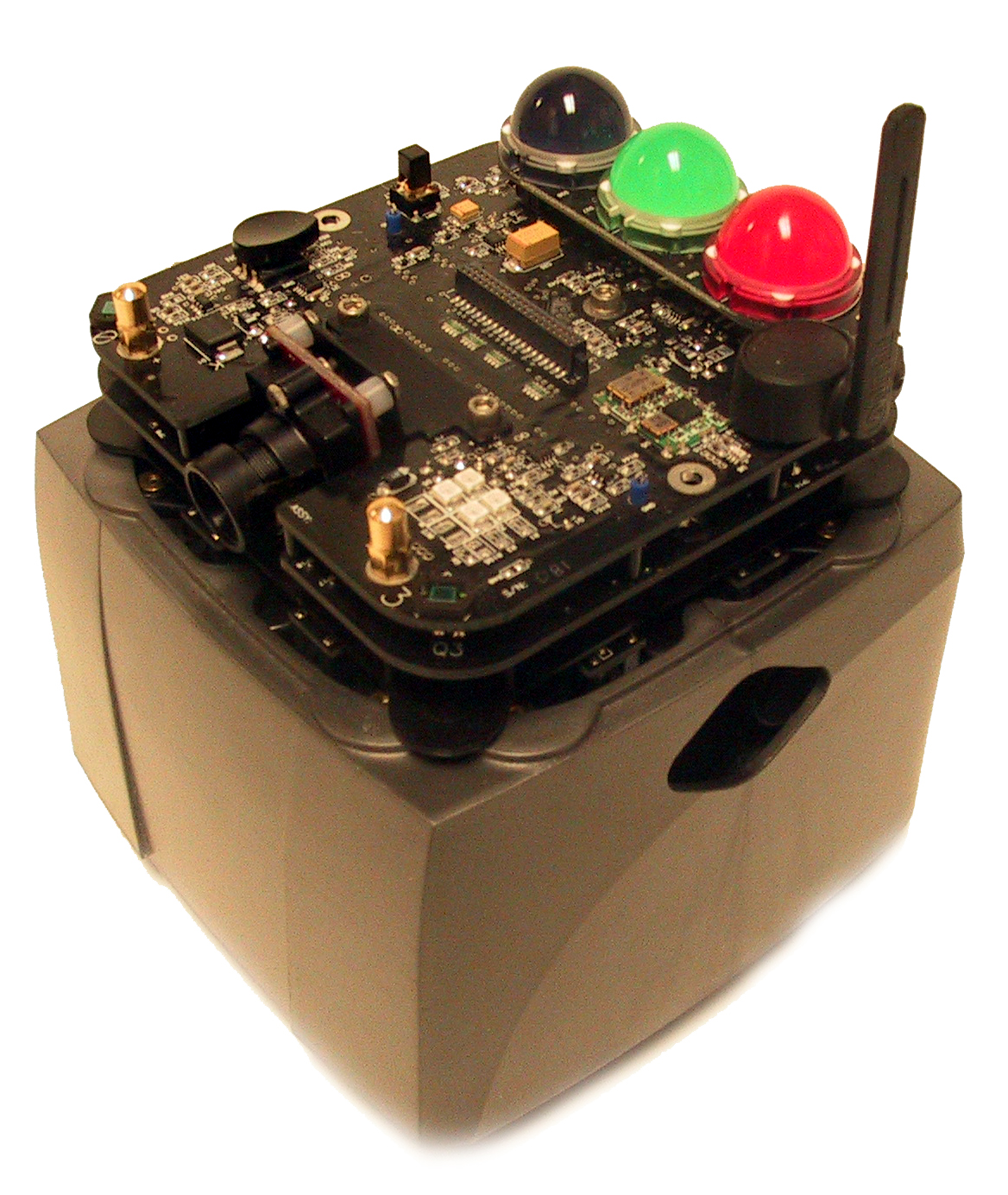
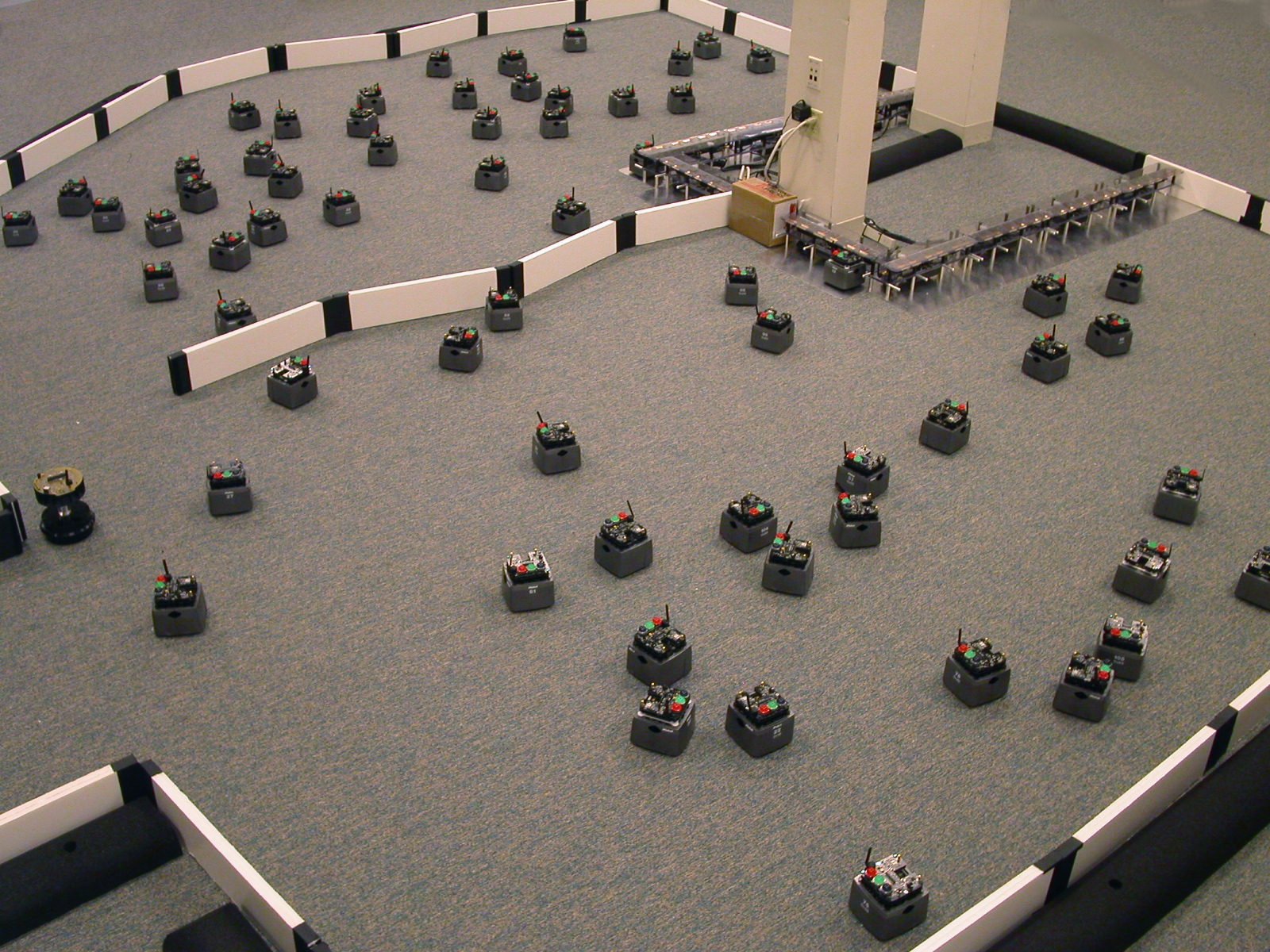
The swarm of robots used for my work is shown below, and was built during my tenure at iRobot corporation as project manager and lead software engineer on the DARPA-funded Swarm project. The core of the system is the infrared inter-robot communication and localization system. This hardware was designed to provide each robot with its local network geometry: network connectivity and local pose estimation of neighboring robots. Multi-robot configuration control algorithms must be able to sense the geometry of the network. The most common sensor models assume that either only the ranges between robots is known, or that there is a global coordinate system. However, range-only models require extensive computation to produce useful geometric information, and global coordinates might not be available in all environments. The local network geometry model is a compromise between these two that is well-suited to multi-robot systems.

The orientation behavior below demonstrates the local network geometry. Visit the distributed algorithm library page to see more algorithme that use the local network geometry.
matchOrientation (3,661,KB mpg)





The pictures above show the matchHeadingToRobot behavior in action. The robot with the antenna is the reference robot, all other robots are active robots.
"Speaking Swarmish: Human-Robot Interface Design for Large Swarms of Autonomous Mobile Robots"
James McLurkin, Jennifer Smith, James Frankel, David Sotkowitz, David Blau, Brian Schmidt. AAAI Spring Symposium, March 28, 2006 ![]() , presentation slides
, presentation slides ![]()
"Protoswarm: A Language for Programming Multi-Robot Systems Using the Amorphous Medium Abstraction"
Jonathan Bachrach, James McLurkin, Anthony, Grue, Proceedings of the 7th international joint conference on Autonomous agents and multiagent systems, May, 2008.![]()