James McLurkin and Daniel Yamins, Robotics: Science and Systems Conference, June 8, 2005
The goal of this project is to design a library of practical, well-abstracted, multi-robot distributed algorithms, suitable for many applications. One example application was searching a building for an item of interest. Videos of some of the primitive behaviors are below, videos of the building search application are near the bottom of the page.
"Dynamic Task Assignment in Robot Swarms"
James McLurkin and Daniel Yamins, Robotics: Science and Systems Conference, June 8, 2005 ![]()
"Distributed Algorithms for Dispersion in Indoor Environments using a Swarm of Autonomous Mobile Robots"
James McLurkin and Jennifer Smith, Distributed Autonomous Robotic Systems Conference, June 23, 2004 ![]()
"Stupid Robot Tricks: A Behavior-Based Distributed Algorithm Library for Programming Swarms of Robots"
James McLurkin, S.M., M.I.T., 2004, Thesis Supervisor: Leslie P. Kaelbling![]()
The behaviors described below are primitive building blocks for building more complicated swarm applications. Their inner workings are described in detail in my Master's Thesis.
matchOrientation (3,661,KB mpg)





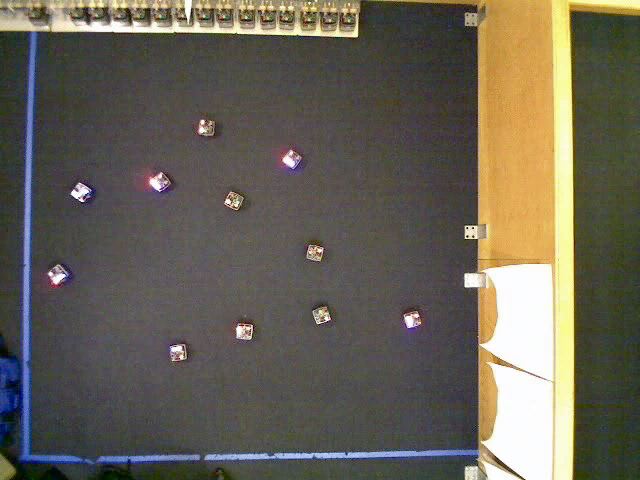
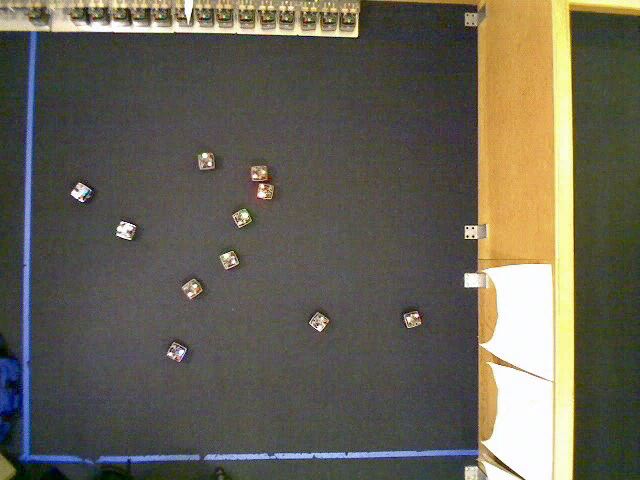
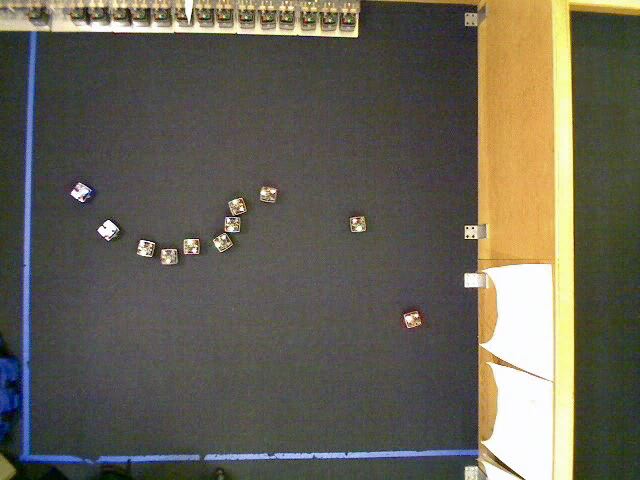
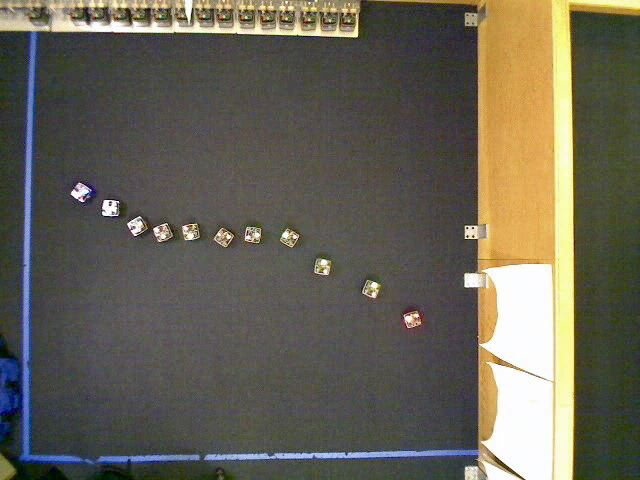
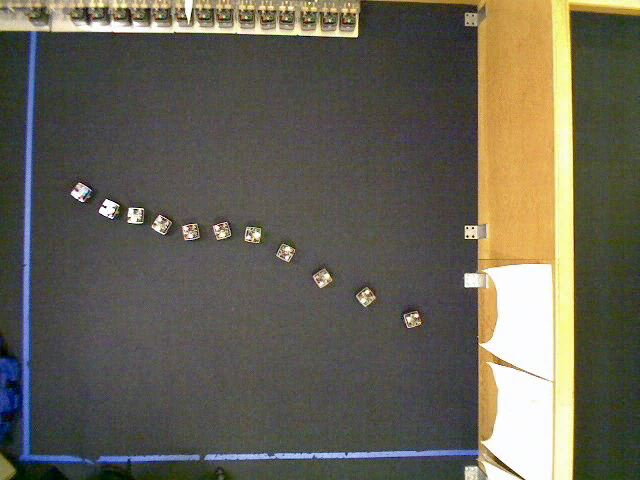
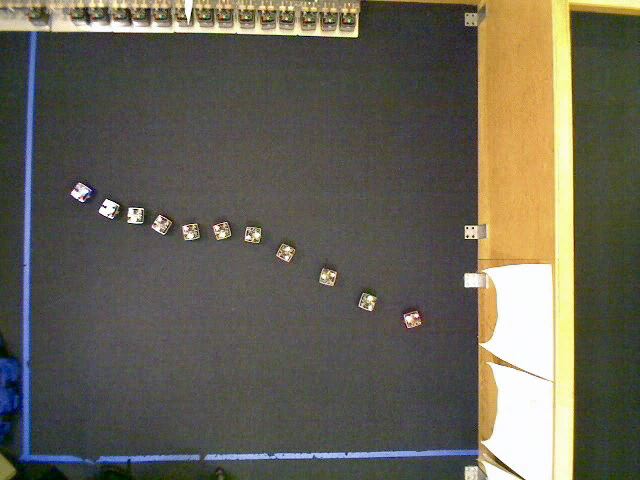
The pictures above show the matchHeadingToRobot behavior in action. The robot with the antenna is the reference robot, all other robots are active robots.
beaconNavigation (3,071 KB mpg)
![]()
![]()
![]()
orbitRobot (4,027 KB mpg)



disperseFromSource (3,702 KB mpg)






disperseUniformly (4,363 KB mpg)





disperseUniformly-2 (4,010 KB mpg)





followTheLeader (20,903 KB mpg)






navigateGradient (4,948 KB mpg)





clusterOnSource (4,635 KB mpg)
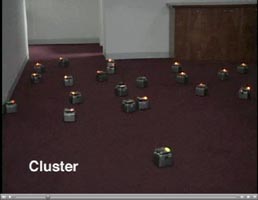

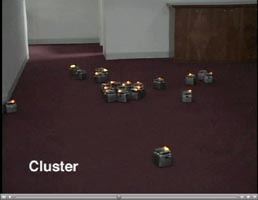
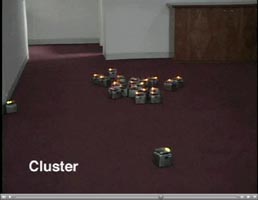

clusterIntoGroups (3,298 KB mpg)






counting (8,010 KB mpg)

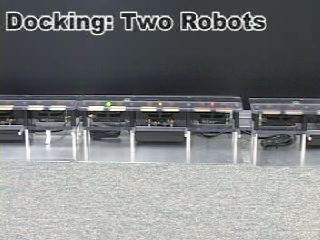
dockToCharger (3,629 KB mpg)




Physical Bubble Sort (23,425 KB avi)
SwarmTrek-DarkRoom (31,251 KB avi)






SwarmTrek-WalkThrough (2,718 KB mpg)

SwarmTrek-clusterWithBreadCrumbs (8,688 KB avi)




