matchOrientation (3,661,KB mpg)





The pictures above show the matchHeadingToRobot behavior in action. The robot with the antenna is the reference robot, all other robots are active robots.




As robots become more and more useful, multiple robots working together on a single task will become commonplace. Many of the most useful applications of robots are particularly well-suited to this "swarm" approach. Groups of robots can perform these tasks more efficiently, and can perform them in fundamentally different ways than robots working individually. However, swarms of robots are difficult to program and coordinate. My work focuses on developing software and programming techniques applicable to large swarms of robots, with populations in the 10 to 10,000 range. Software is evaluated on the 100-robot iRobot swarm.
There are many applications for swarms of robots. Multiple vacuum cleaner robots might need to share maps of areas where they've previously cleaned. A swarm of mars rovers might need to disperse throughout the environment to locate promising areas, while maintaining communications with each other. Robots used for earthquake rescue might come in three flavors: thousands of cockroach-sized scouts to infiltrate the debris and locate survivors, a few dozen rat-sized structural engineers to get near the scene and solve the "pick-up-sticks" problem of getting the rubble off, and a few brontosaurus-sized heavy-lifters to carry out the rescue plan.
In all these applications, individual robots must work independently, only communicating with other nearby robots. It is either too expensive (robot vacuums need to be very cheap), too far (it takes 15 minutes for messages to get to Mars), or impossible (radio control signals cannot penetrate into earthquake ruble) to control all of the robots from a centralized location. However, a distributed control system can let robots interact with other nearby robots, cooperating amongst themselves to accomplish their mission.
The main goal of my research is to understand how to use local interactions between nearby robots to produce large-scale group behaviors from the entire swarm. This idea is not new, in fact it is almost 65 million years old. Ants, bees, and termites are beautifully engineered examples of this kind of software in use. These insects do not use centralized communication, there is no strict hierarchy, and no one in charge.
However, developing swarm software from the "top down", i.e. by starting with the group application and trying to determine the individual behaviors that it arises from, is very difficult. Instead, I am developing a library of "group behavior building blocks" that can be combined to form larger, more complex applications. The robots use these behaviors to communicate, cooperate, and move relative to each other. Some behaviors are simple, like following, dispersing, and counting. Some are more complex, like dynamic task assignment, temporal synchronization, and gradient tree navigation. There are currently about forty of these behaviors. They are designed to produce predictable outcomes when used individually, or when combined with other library behaviors, allowing group applications to be constructed much more easily.
Robots are going to be an important part of the future. Once robots are useful, groups of robots are the next step, and will have tremendous potential to benefit mankind. Software designed to run on large groups of robots is the key needed to unlock this potential.
The behaviors described below are primitive building blocks for building more complicated swarm applications. Their inner workings are described in detail in my Master's Thesis.
matchOrientation (3,661,KB mpg)
The pictures above show the matchHeadingToRobot behavior in action. The robot with the antenna is the reference robot, all other robots are active robots.
beaconNavigation (3,071 KB mpg)
![]()
![]()
![]()
orbitRobot (4,027 KB mpg)



disperseFromSource (3,702 KB mpg)






disperseUniformly (4,363 KB mpg)





disperseUniformly-2 (4,010 KB mpg)





followTheLeader (20,903 KB mpg)






navigateGradient (4,948 KB mpg)





clusterOnSource (4,635 KB mpg)
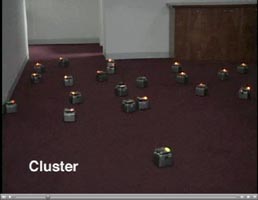

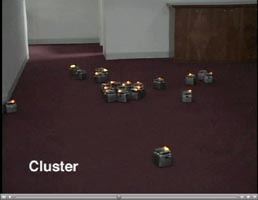
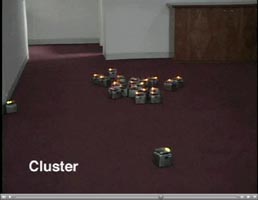

clusterIntoGroups (3,298 KB mpg)






counting (8,010 KB mpg)

dockToCharger (3,629 KB mpg)




SwarmTrek-DarkRoom (31,251 KB avi)






SwarmTrek-WalkThrough (2,718 KB mpg)

SwarmTrek-clusterWithBreadCrumbs (8,688 KB avi)




