@inproceedings{xu2021moghs,
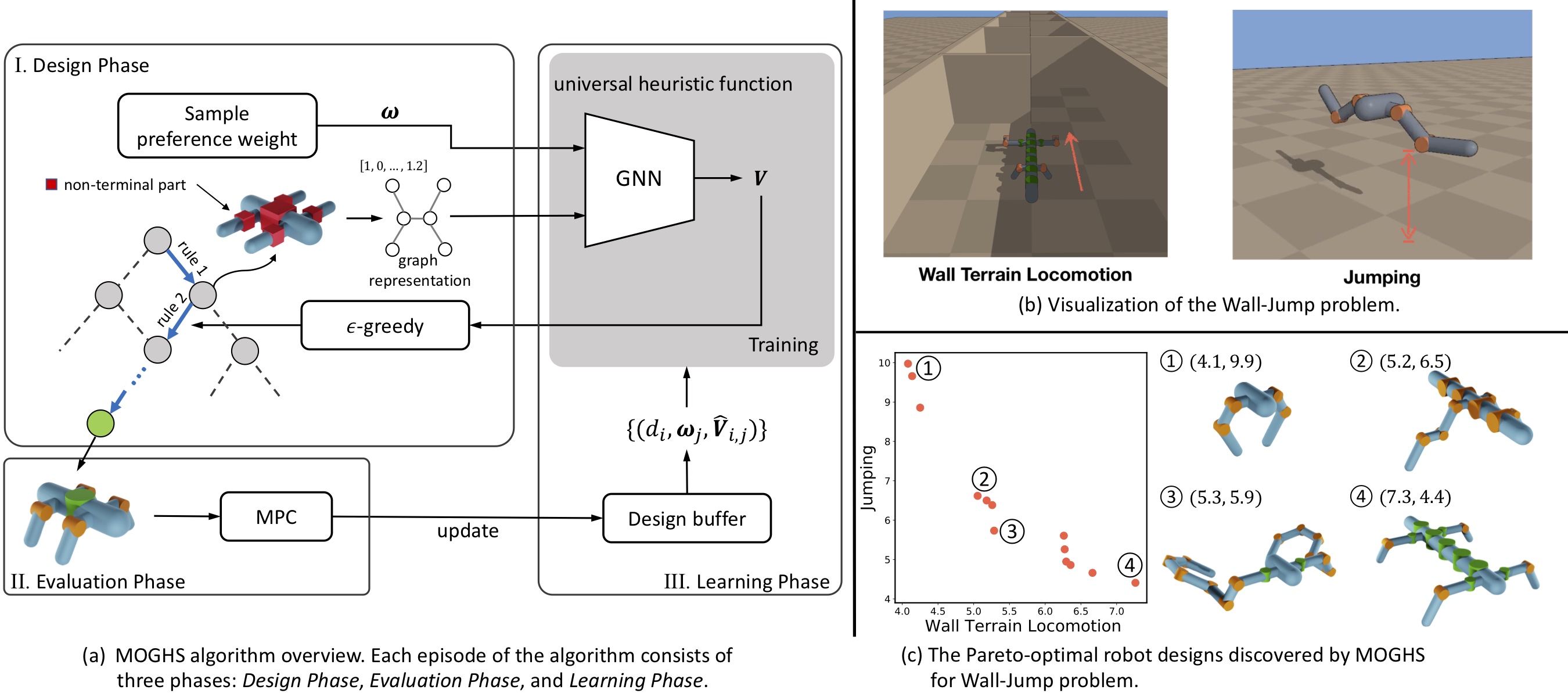
title={Multi-Objective Graph Heuristic Search for Terrestrial Robot Design},
author={Xu, Jie and Speilberg, Andrew and Zhao, Allan and Rus, Daniela and Matusik, Wojciech},
booktitile={2021 International conference on robotics and automation (ICRA)},
year={2021},
organization={IEEE}
}