List of all members.
Public Member Functions |
|
virtual Eigen::VectorXd | error (Selector s=ESTIMATE) const |
|
std::vector< Node * > & | nodes () |
|
| Factor (const char *name, int dim, const Noise &noise) |
|
virtual void | initialize ()=0 |
|
virtual void | initialize_internal () |
|
virtual void | set_cost_function (cost_func_t *ptr) |
|
virtual Eigen::VectorXd | basic_error (Selector s=ESTIMATE) const =0 |
|
virtual const Eigen::MatrixXd & | sqrtinf () const |
|
Eigen::VectorXd | evaluate () const |
|
virtual Jacobian | jacobian_internal (bool force_numerical) |
|
virtual Jacobian | jacobian () |
|
int | num_measurements () const |
|
void | mark_deleted () |
|
bool | deleted () const |
|
virtual void | write (std::ostream &out) const |
Protected Attributes |
|
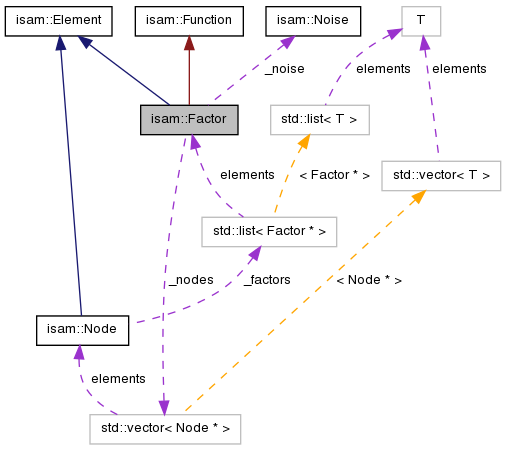
const Noise | _noise |
|
std::vector< Node * > | _nodes |
Friends |
|
std::ostream & | operator<< (std::ostream &output, const Factor &e) |
Detailed Description
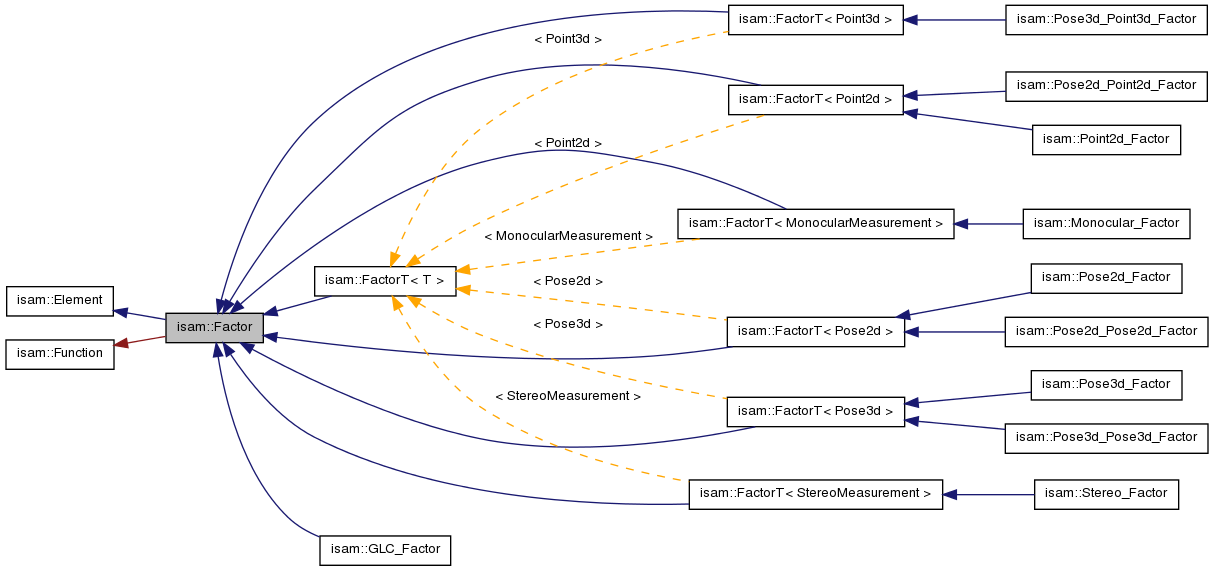
Definition at line 49 of file Factor.h.
The documentation for this class was generated from the following files:


 1.7.6.1
1.7.6.1