 What is bilateral cruise control?
What is bilateral cruise control?  What is Gizmo Garden Robot? Specify Gizmo Garden Robots for the demonstrations The experiments
What is Gizmo Garden Robot? Specify Gizmo Garden Robots for the demonstrations The experiments 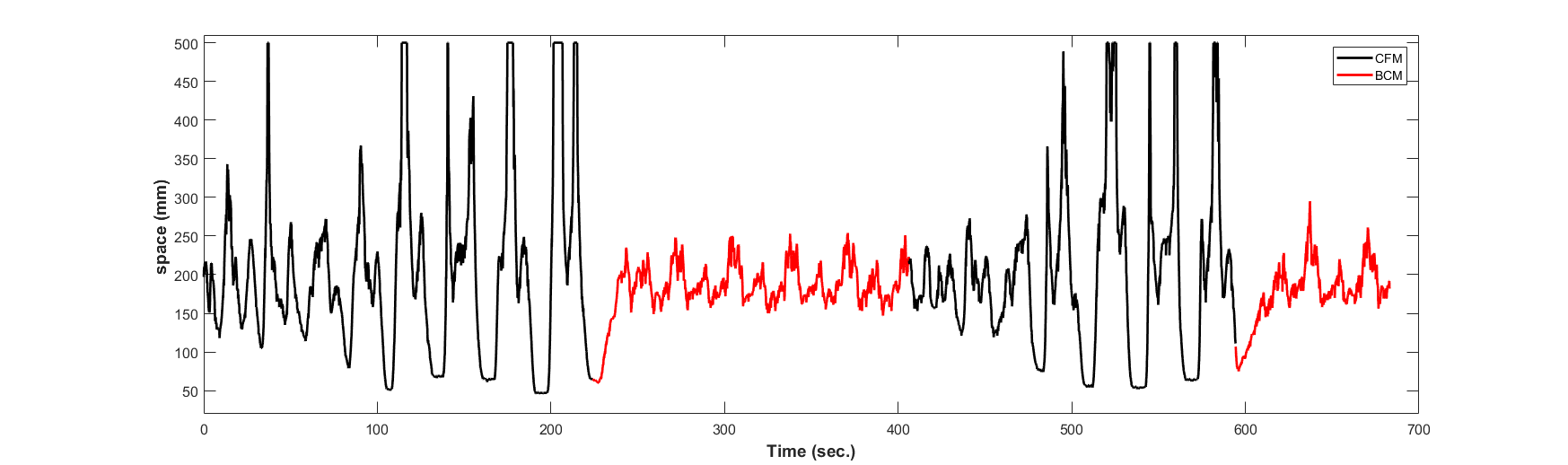
Fig.1: The measured space by car 2 (coresponding to video 4). black curve is the measurement during the car-following control period. Red black curve is the measurement during the BCM period. Under CFM, obvious “stop-and-go” pattern appear, i.e. large space and small space alternating. Under bilateral cruise control, traffic flow instabilities are suppressed effectively. The space is kept about 200 mm. No small space. Failure of detection due to the turning of cars on the corner and noise in the distance measurements cause the fluctuation in space measurement. However, the motion of the traffic is still pretty smooth. Thus, bilateral cruise control can be used in reality robustly.
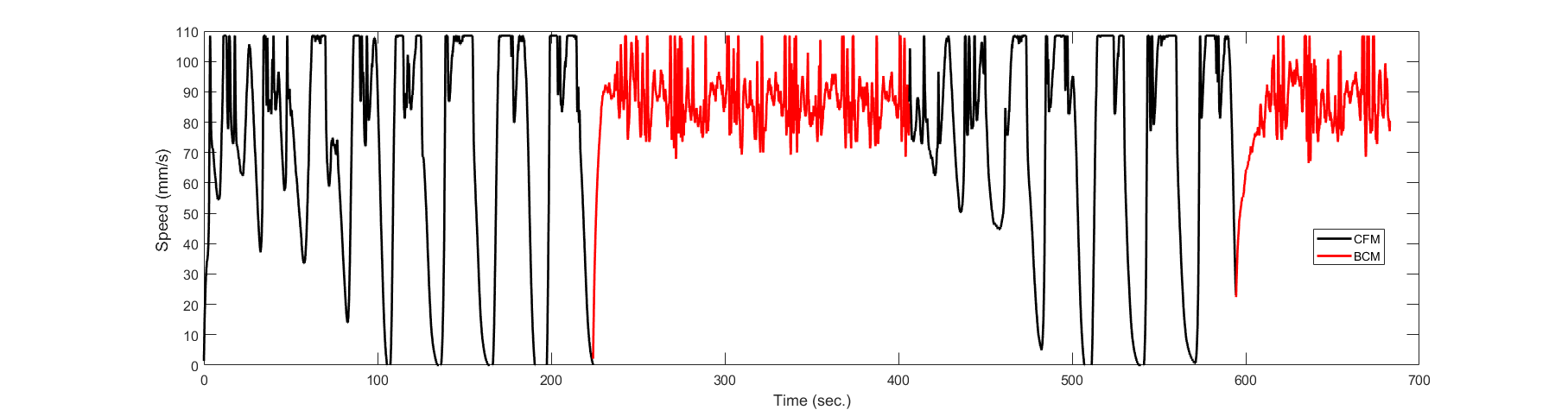
Fig.2: The speed of car 2 (coresponding to video 4). black curve is the measurement during the CFM period. Red black curve is the measurement during the BCM period. Under CFM, obvious “stop-and-go” pattern appear, i.e. high speed and very low speed alternating. Under BCM, traffic flow instabilities are suppressed effectively. The speed is kept about 90 mm/s. No very low speed.
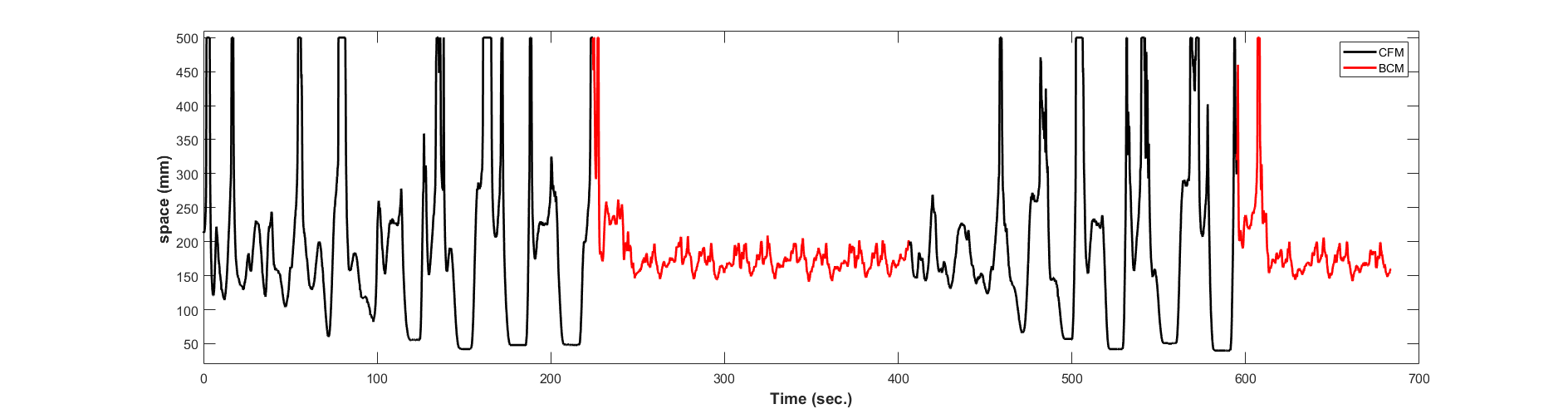
Fig.3: The measured space by car 13 (coresponding to video 4). black curve is the measurement during the CFM period. Red black curve is the measurement during the BCM period. Under CFM, obvious “stop-and-go” pattern appear, i.e. large space and small space alternating. Under BCM, traffic flow instabilities are suppressed effectively. The space is kept about 200 mm. No small space. Failure of detection due to the turning of cars on the corner and noise in the distance measurements cause the fluctuation in space measurement. However, the motion of the traffic is still pretty smooth. Thus, BCM can be used in reality robustly.
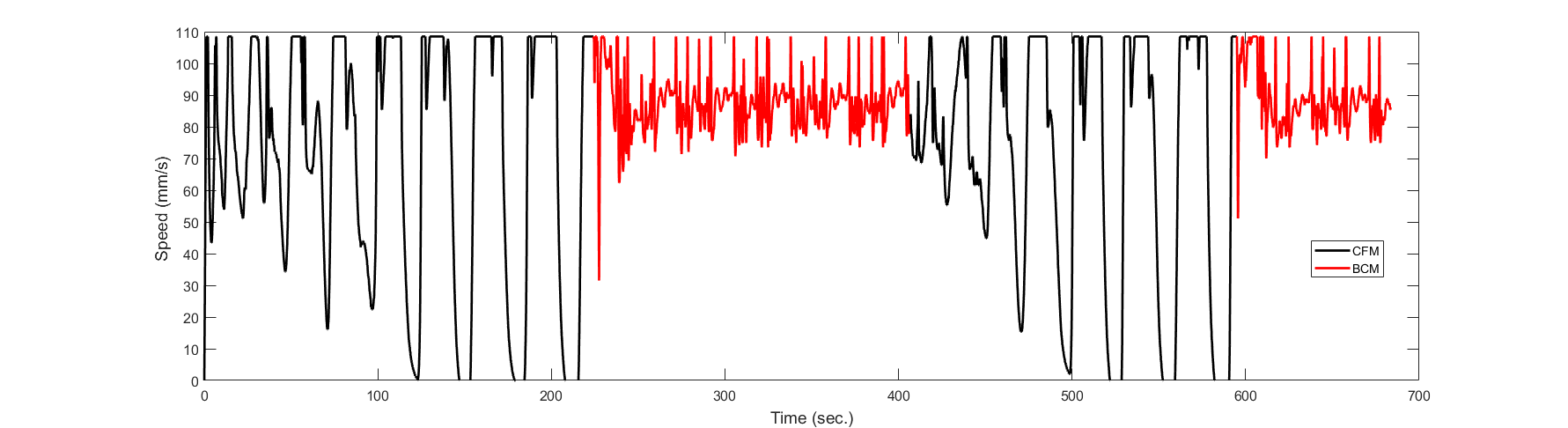
Fig.4: The speed of car 13 (coresponding to video 4). black curve is the measurement during the CFM period. Red black curve is the measurement during the BCM period. Under CFM, obvious “stop-and-go” pattern appear, i.e. high speed and very low speed alternating. Under BCM, traffic flow instabilities are suppressed effectively. The speed is kept about 90 mm/s. No very low speed.