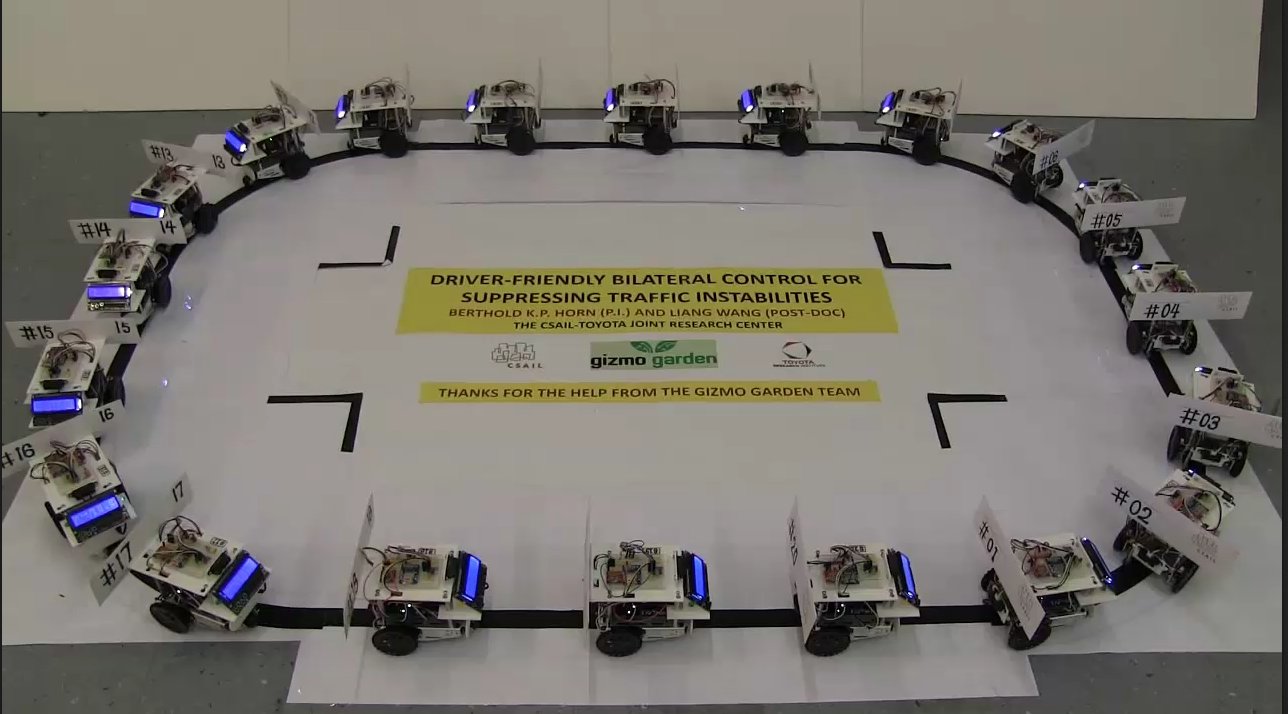
Suppressing Traffic Flow Instabilities using Bilateral Control
First, the video “Traffic Jams — and how to get rid of them:”
Some details
In the “car following” model, acceleration of each vehicle depends
on distance and relative velocity of the leading vehicle.
In the “bilateral control” model, acceleration of each vehicle depends
on distance and relative velocity of the leading and
(counterintuitively) the following vehicle.
For additional online information click the following link:
Suppressing traffic flow instabilities using bilateral control
See also the “Bilateral Control” section of
Liang Wang's web page (scroll down)
and
Car-following and Bilateral Control experiments.
Below are some more illustrations of the “phantom traffic jam” as an
“emergent property” of a string of
dynamical systems under the “car following” model —
and the suppression of these flow instabilities using “bilateral control.”
(1) Car following:
The red car in the middle applies the brakes briefly:

Closeup of track near point of initial disturbance (red car):

With “car following” control,
disturbances move upstream (to the left) only, and increase in amplitude as they go.
The disturbance near the initial cause dies down, but the wave travelling
upstream does not —
eventually forming a phantom traffic jam.
(2) Bilateral control:
The red car in the middle applies the brakes briefly:

Closeup of track near point of intial disturbance (red car):

With “bilateral” control, disturbances travel in both directions and decrease in amplitude.
The system soon returns to smooth flow!
Shown in (1) and (2) above are sequences of initially equally spaced vehicles travelling at a common velocity
(traffic flow is shown in a coordinate system moving along the track at the common initial velocity —
so cars moving at that velocity appear stationary in the animations)
The vehicle in the middle (marked in red) briefly applies the brakes hard.
Two different control schemes are illustrated:
(1) “car following” and
(2) “bilateral control.”
Positional feedback constant kd=0.2 (units: sec-2) and
velocity feedback constant kv=0.05 (units: sec-1) in both (1) amd (2).
Detailed behavior depends on these gains and other parameters,
but the overall difference between the two control schemes is clear.
(The animations are speeded up by a factor of 10).
(3) A more complex situation:
One minute of car following control — followed by bilateral control:
Shown is a recording of a sample run of a simple
simulator
(download by clicking on the link) (*).
The system starts out in a reasonable state, but
“phantom traffic jams” start to form
about 30 seconds in —
even though all the cars are following standard “car following” protocol.
The “bilateral control” algorithm is switched on at the one-minute mark.
The phantom traffic jams soon clear up!
Simulator
For a more elaborate simulator, download:
Liang Wang's
Damping Traffic Flow Instabilities Java Application
(You will need to install Java if you don't
already have it).
Some Papers:
-
B.K.P. Horn,
“Suppressing Traffic Flow Instabilities,”
IEEE Intelligent Transportation Systems Conference (ITSC 2013),
Den Haag, Netherlands,
2013 October 6-9.
-
T. Baran, B.K.P. Horn,
“A Robust Signal-Flow Architecture For Cooperative Vehicle Density Control,”
Proceedings of the 38th International Conference on Acoustics, Speech, and
Signal Processing} (ICASSP 2013),
Vancouver, Canada,
2013 May 26-31.
-
Liang Wang, B.K.P. Horn, G. Strang,
“Eigenvalue and Eigenvector Analysis of Stability for a Line of
Traffic,”
Studies in Applied Mathematics,
2016 September.
-
B.K.P. Horn and Liang Wang,
“Wave Equation of Suppressed Traffic Flow Instabilities,”
IEEE Transactions on Intelligent Transportation Systems (ITS),
2017 December.
-
Liang Wang and B.K.P. Horn,
“Multi-Node Bilateral Control Model,”
IEEE Transactions on Automatic Control,
Vol. 64, No. 10, October 2019.
-
Liang Wang, Françoise Tisseur, Gilbert Strang and B.K.P. Horn,
“Stability analysis of a chain of non-identical vehicles under bilateral cruise control,”
School of Mathematics, University of Manchester,
2019.
-
Liang Wang and B.K.P. Horn,
“On the stability analysis of mixed traffic with vehicles under
car-following and bilateral control,”
IEEE Transactions on Automatic Control,
July 2020.
-
Liang Wang and B.K.P. Horn,
“On the Chain-Stability of Bilateral Control Model,”
IEEE Transactions on Automatic Control,
August 2020.
Some Press Coverage:
(*) To run the simulator you may have to add this web site to the Exception Site List.
In Windows, for example, go to the Control Panel, click on "Java", select "Security",
then click "Edit Site List" and add "http://people.csail.mit.edu/bkph/" to the
list
(See video instructions,
thanks to Liang Wang).
“人工智能”工作坊第九讲:基于无人车的智能感知与控制
Berthold K.P. Horn,
bkph@ai.mit.edu
Accessibility