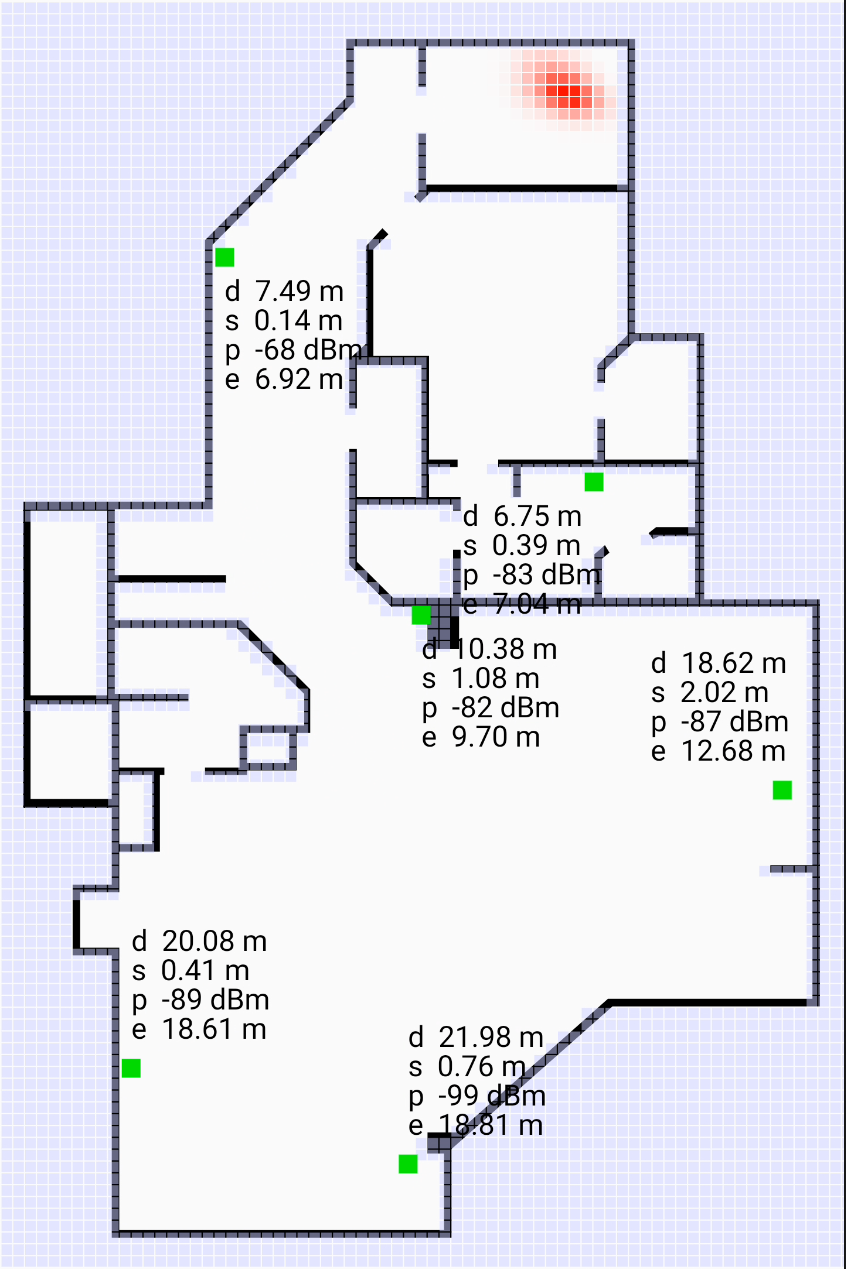
If a single position is required as output, rather than a distribution, one can, for example, use the mode (maximum likelihood) or the centroid (expected value) of the distibution.
As with other forms of “filtering”, there can be a lag in the response when the initiator moves more rapidly than the transition model expects. Also, a bad solution may get “trapped” behind walls, when a floor plan is used to prevent moving through walls in the transition model.