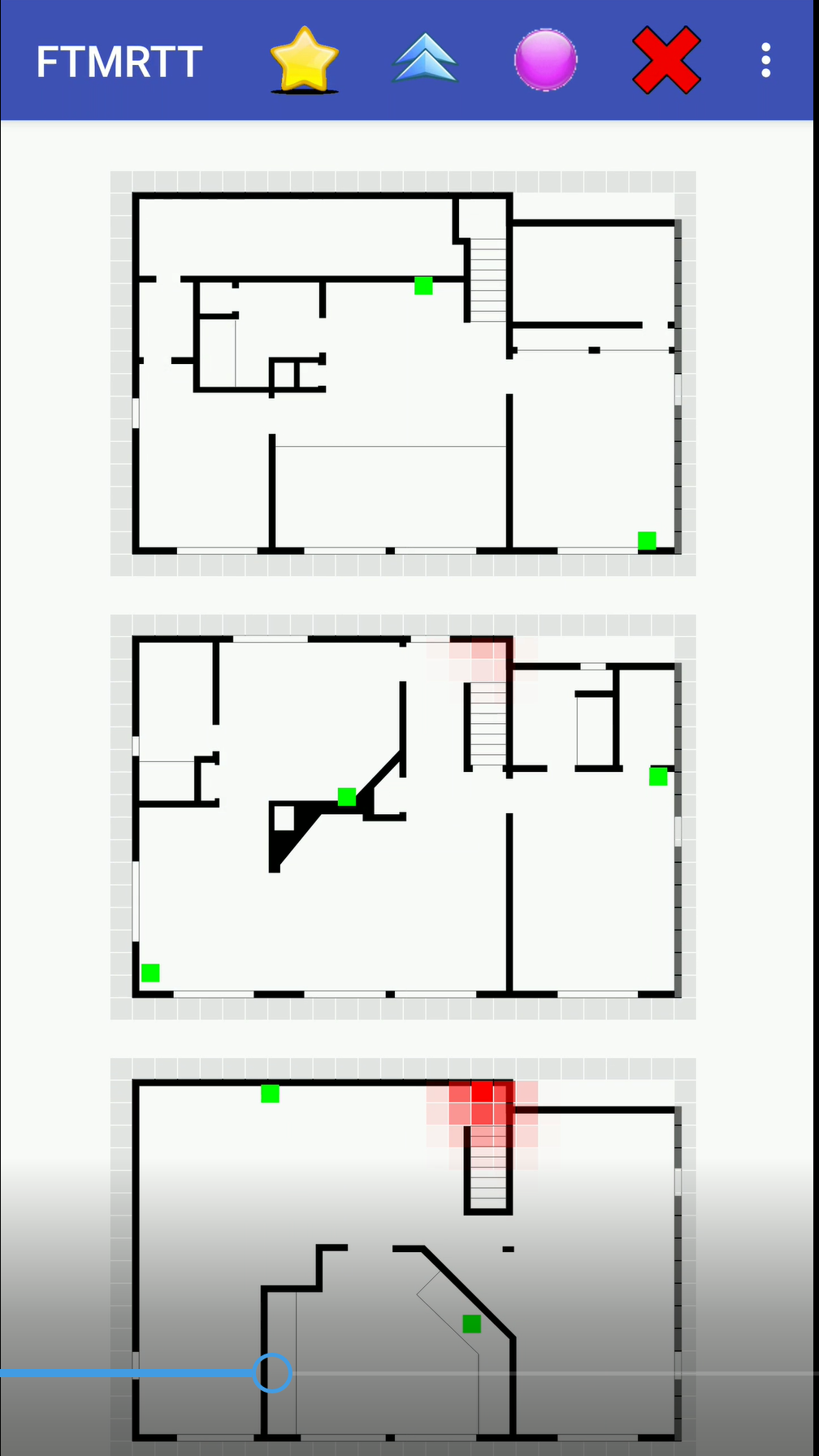
The animation above shows floor plans of three levels of a building with six “responders” (Wi-Fi access points advertizing IEEE 802.11mc FTM RTT) shown in green, and the estimates of positions computed by an Android smartphone shown in red, as it is carried upstairs and around floors. The position is recovered in 3-D and then quantized to floor level for plotting. Here the floor plan is only for visualization and not used in the computation of the position of the phone. As a result, the red dot may at times appear to pass through a wall or even appear outside the building.
The final position accuracy is about a meter or two (aside from the occasional outlier), while the raw distance measurements have a 10% to 90% CDF (cumulative distribution function) range of between say 0.2 and 0.8 meter, depending on circumstances (see Measurement Error). The “dilution of precision” (noise gain), depends on the positions of the responders, and varies throughout the volume. Optimal placement of responders is an open problem (see FTM RTT Placement), as is the best way to deal with the measurement errors.
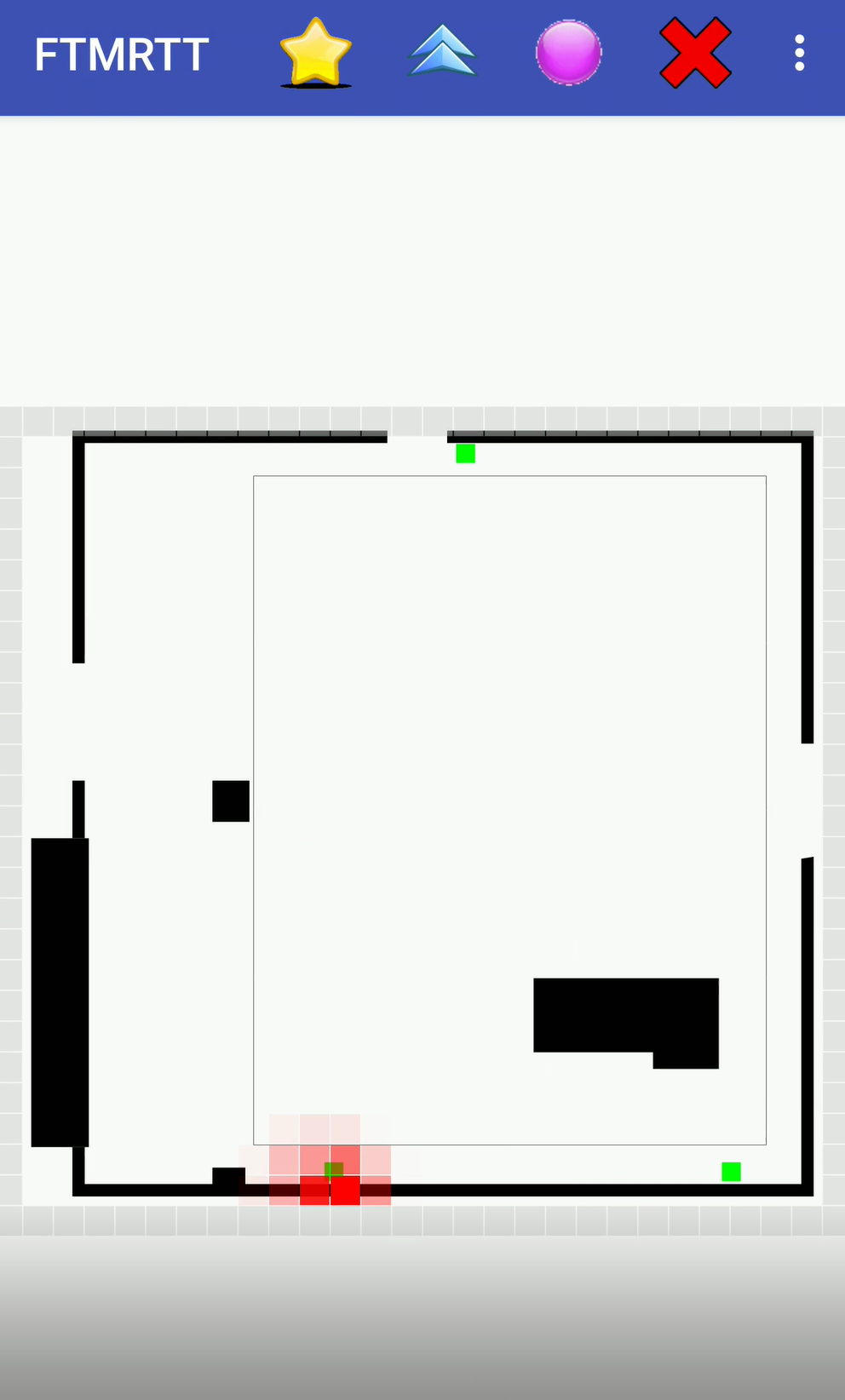
Walking around a classroom (Holmes Hall 389, University of Hawaii, Manoa)
using 3 APs supporting IEEE 802.11mc (FTM RTT).
Relatively easy problem due to openness of the space,
cooperating APs, high density of APs, and 2-D topology.
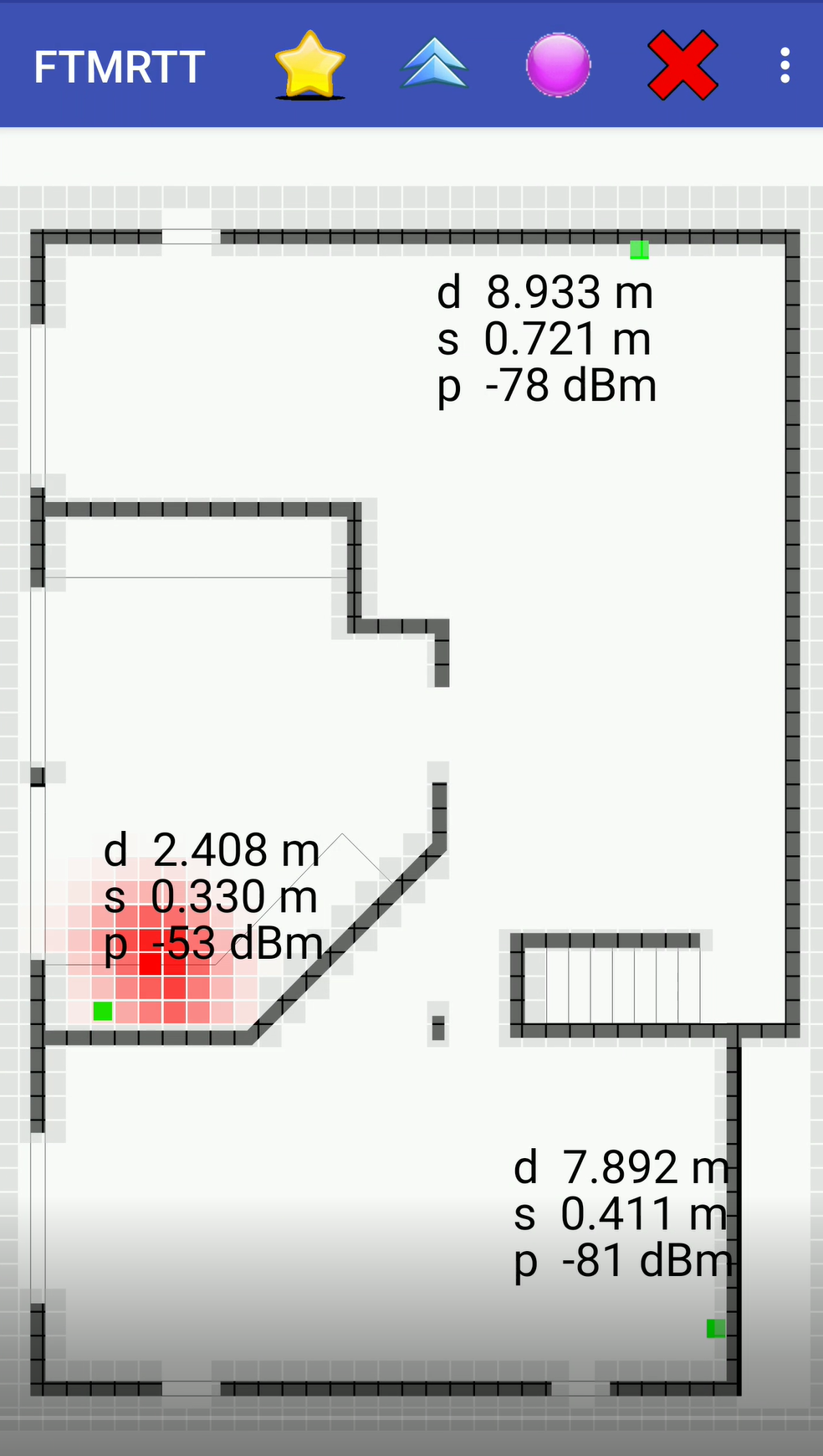
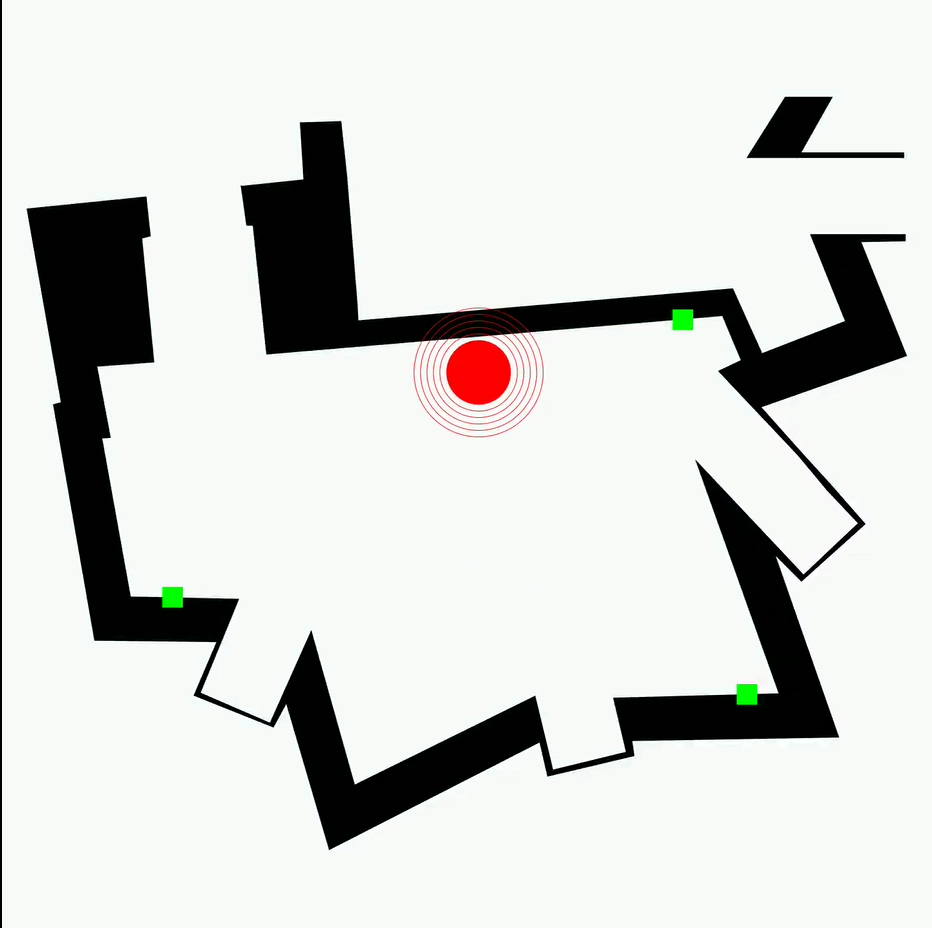
Wandering around one floor of a residential building with
dividing walls (about 8 m x 10 m) [1].
A bit harder due to presence of some retarders (*) and attenuators.
Overlay of rate vector densities used in Bayesian update.
This gives a feel for the quality of measurement data and its change
with time — when nothing is moving.
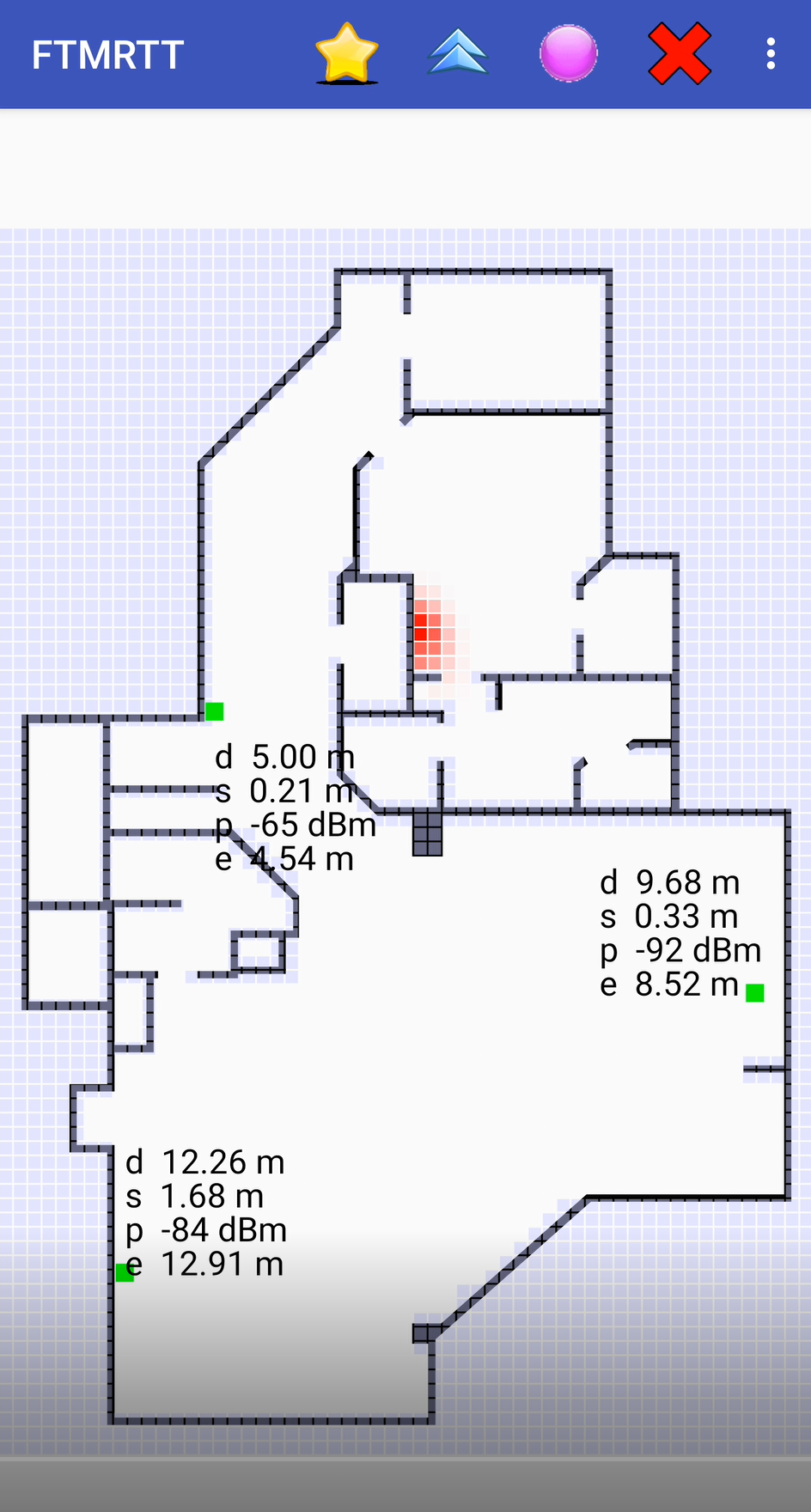
Wandering around a large house (about 12 m x 20 m) with 3 APs
[2].
This example is more difficult because of the considerably
lower density of APs,
as well as the distribution of retarding and attenuating materials
(including some reinforced concrete).
Three-dimensional problem: wandering around a three-story residence
with obstructions (walls, floors, furniture etc.) [1, 2].
Uncooperative APs in large box store (about 80 m x 120 m) [4].
(Same as the above, but in the original real time version)
Outdoor application using one-sided RTT (uncooperative APs).
Outdoor application using two-sided RTT (cooperative APs).
(*) Refractive retardation:
Construction materials, and merchandise on shelves, have large
relative permittivity \(\varepsilon_{\mathrm {r} }\) —
in the range 2–40 —
(with relative permeability \(\mu_{\mathrm {r} }\) around 1).
The equivalent refractive index \(n\) is proportional to the square root of the product of
permittivity and permeability, i.e.
\(
n={\sqrt {\varepsilon _{\mathrm {r} }\mu _{\mathrm {r} }}}
\).
The speed of propagation of electromagnetic radiation is inversely proportional to the refractive index.
As a result, FTM RTT “distances” are larger than the actual distances,
often much larger.
You can download the
WifiRttScan App from Google (the app will only install on phones
that support FTM RTT and run Android Pie or later).
They say the following:
“The WifiRttScan app is a research, demonstration, and testing tool
for developers, vendors, universities, and more. With this app it is
possible to obtain a 1-2 meter range accuracy to nearby Wi-Fi RTT
(IEEE 802.11mc) capable access points. This is especially useful indoors
where GPS is not available. Developers, OEMs and researchers can use
this tool to validate range measurements enabling the development of
positioning, navigation and context-aware applications based on the
Wi-Fi RTT API.”
See also WifiRttScanX, an app
originally based on the same open source code,
but with somewhat different features and production of log files.
Click on the following image
First 3-D indoor localization based on FTM RTT observations.

First indoor localization using RTT w.r.t. APs that do not
support IEEE 802.11mc.
More difficult because most measurements are not line of sight
and are, as a result, dominated by refractive retardation (*)
(Speeded up version — thanks Wenchao Liu)
Uncooperative APs in large box store (about 80 m x 120 m) [4].
First indoor localization using RTT w.r.t. APs that do not
support IEEE 802.11mc.
More difficult because most measurements are not line of sight
and are, as a result, dominated by refractive retardation (*)
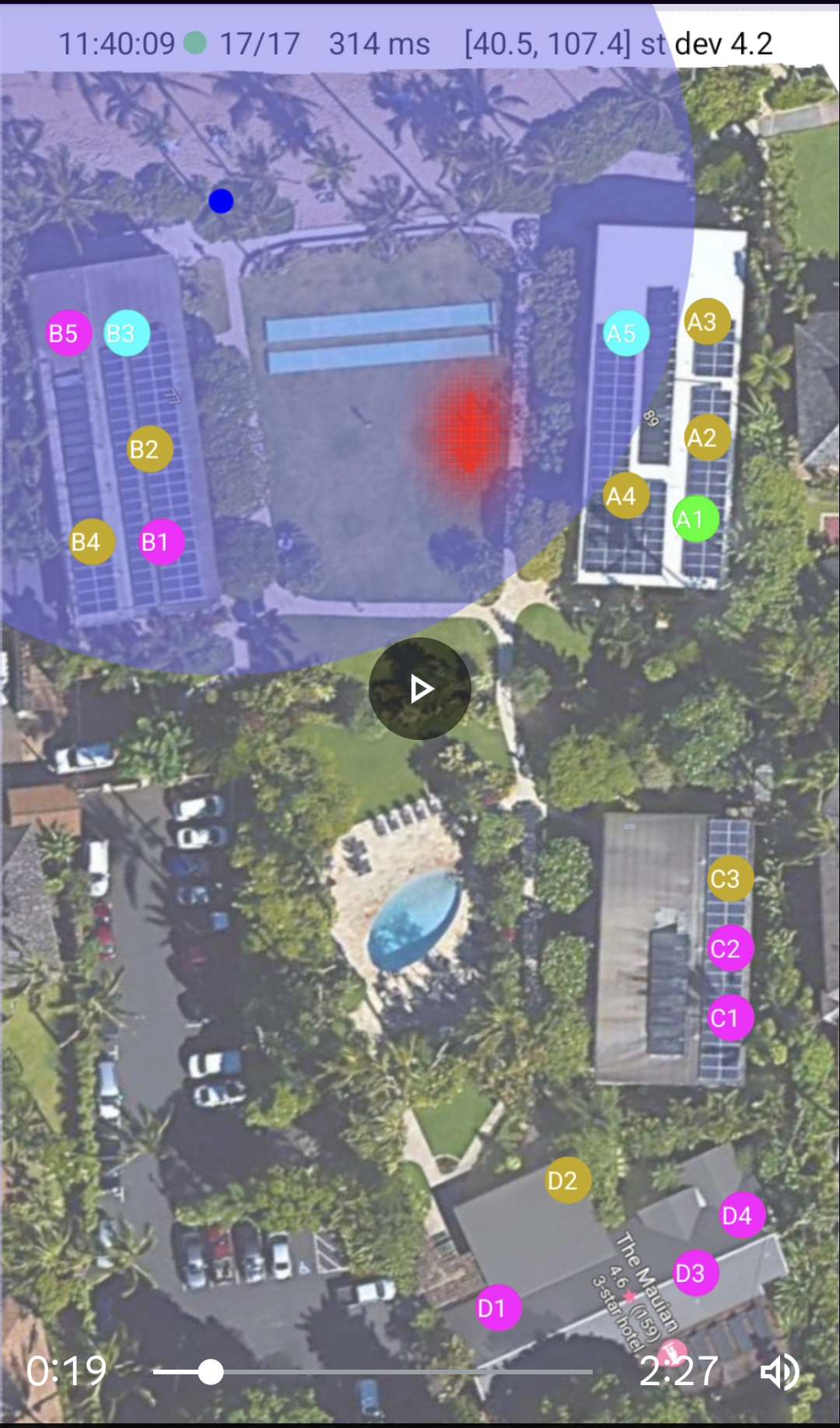
Here all APs are hidden (i.e. no line of sight signaling).
Large area (72 m by 133 m).
![]()
Here all APs are hidden (i.e. no line of sight signaling).
Very large area (120 m by 210 m) - with non-uniform distributionof APs.
Sensors,
special issue on:
Sensors and Sensing Technologies for Indoor Positioning and Indoor Navigation,
Vol. 20, No. 5,
March 2020.
Sensors
special issue on:
Positioning and Navigation,
Vol. 20, No. 14,
July 2020.
David E. Houle, Jr.,
MIT thesis, May 2021.
Sensors
special issue on:
Indoor Wi-Fi Positioning: Techniques and Systems,
Vol. 22, pp. 3091,
April 2022.
Kai Yee Wan,
MIT thesis, May 2023.
Applied Sciences
special issue on:
Smartphone-Based Navigation System for Outdoor Positioning,
Vol. 14, No. 17,
September 2024.
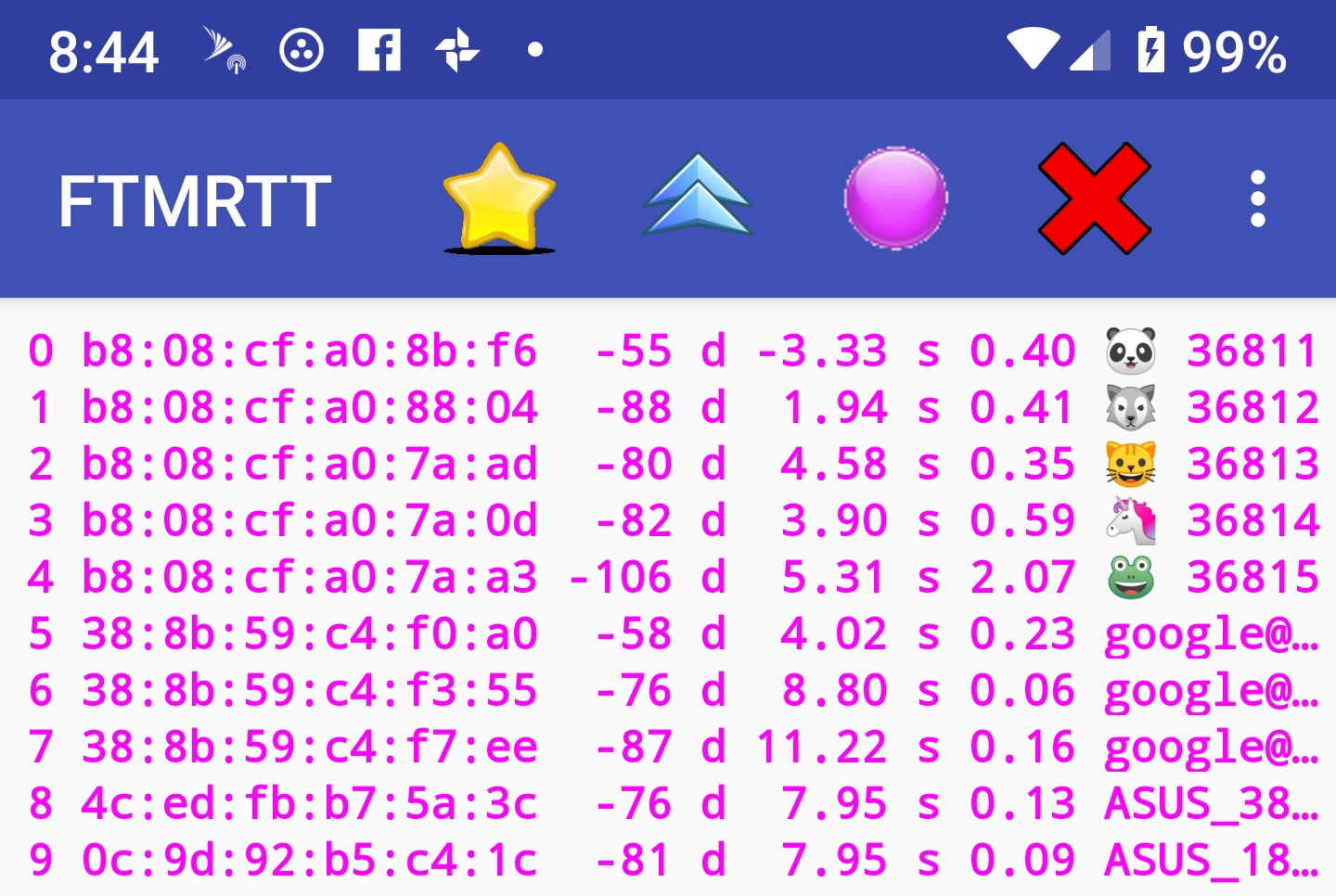
Sample FTM RTT measurements (functionality now part of WifiRttScanX):
Berthold K.P. Horn,
bkph@ai.mit.edu