Pneumatic Soft Robots
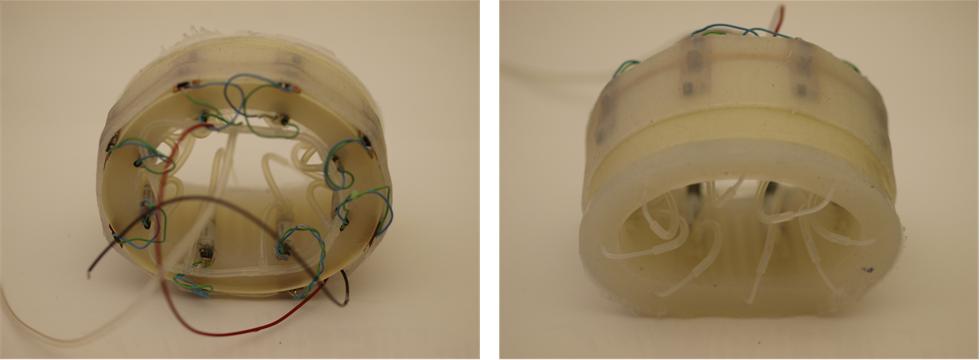
Intelligence, embedded in the mechanics in the form of active compliance provides safety and adaptability for a robot to interact with real-world environments. With large degrees of freedom and unique kinematics, flexible mechanisms can adjust their body to perform various tasks. As a step towards bridging the gap between man-made machines and their biological counterparts, we developed a class of soft mechanisms that can undergo shape change and locomotion under pneumatic actuation. Sensing, computation, communication and actuation are embedded leading to an active soft material. We developed a "Pneumatic Battery" by the catalyzed decomposition of hydrogen peroxide into oxygen and water for actuation power and Electropermanent Magnet Valves to drive the Fluidic Elastomer Actuators. We show instances of such mechanisms and demonstrate shape changing, and autonomous, sensor-based locomotion using distributed control. The flexible system is accurately modeled by an equivalent mass-spring model. We derive a distributed feedback control law that lets a circular robot made of flexible components roll itself and climb up inclinations. These mechanisms and algorithms may provide a basis for creating a new generation of bioinspired soft robots that can negotiate openings and manipulate objects with an unprecedented level of compliance and robustness.
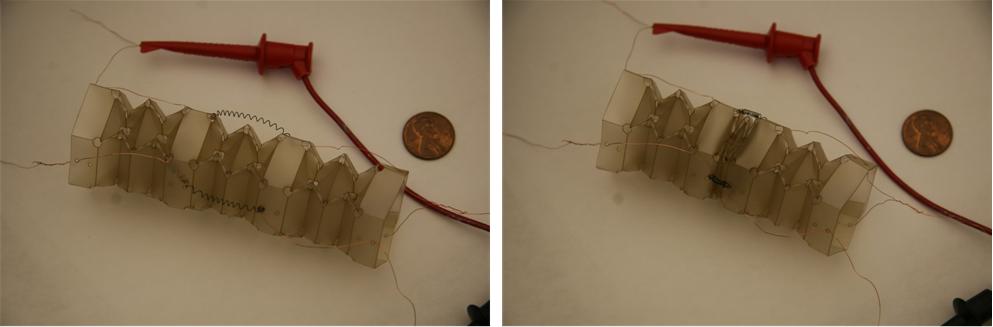
 The ability to print robots introduces a fast and low-cost fabrication method to modern, real-world robotic
applications. To this end, we employ laser-machined origami patterns on polymer sheets to build a new class of robotic systems for mobility
and manipulation. Origami is suitable for printable robotics as it uses only a flat sheet as the base structure for building
complicated functional shapes, which can be utilized as robot bodies. An arbitrarily complex folding pattern can be used to
yield an array of functionalities, in the form of actuated hinges or active spring elements. For actuation, we use compact NiTi
coil actuators placed on the body to move parts of the structure on-demand.
The ability to print robots introduces a fast and low-cost fabrication method to modern, real-world robotic
applications. To this end, we employ laser-machined origami patterns on polymer sheets to build a new class of robotic systems for mobility
and manipulation. Origami is suitable for printable robotics as it uses only a flat sheet as the base structure for building
complicated functional shapes, which can be utilized as robot bodies. An arbitrarily complex folding pattern can be used to
yield an array of functionalities, in the form of actuated hinges or active spring elements. For actuation, we use compact NiTi
coil actuators placed on the body to move parts of the structure on-demand.