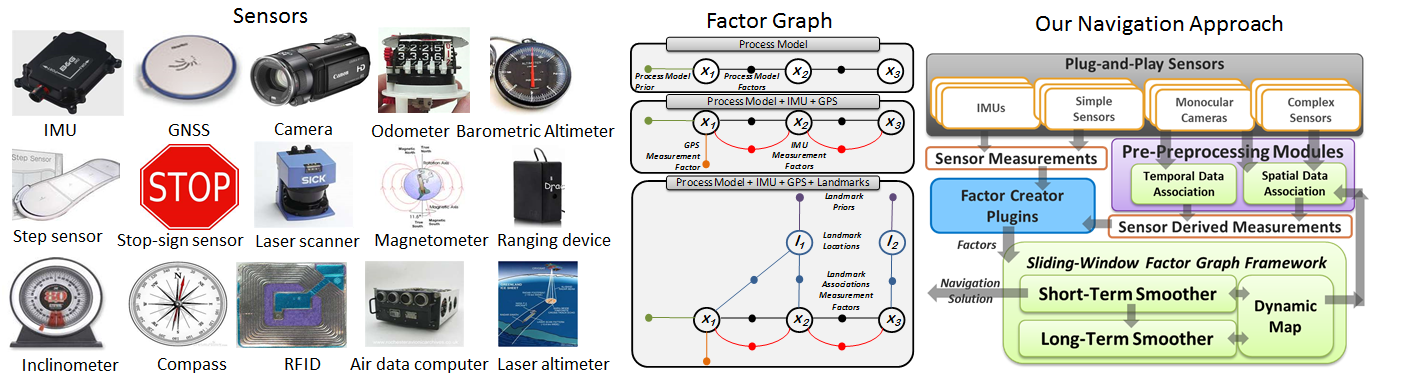
This project seeks to enable low cost, robust, and seamless navigation solutions for users on any operational platform and in any environment. We collaborate with academic researchers at Georgia Institute of Technology and MIT, and government agencies. We are currently developing real-time navigation algorithms and systems needed for rapid integration and reconfiguration of any combination of sensors, by using approaches based on Factor Graphs. In our framework, each sensor measurement is encoded as a factor. This way provides an adaptable and flexible foundation for any plug-and-play sensor. So far we have tested our system with 19 different sensor types (total 57 sensors: each sensor type includes multiple kinds of sensors) mounted on dismount, ground, and aerial platforms.
Our navigation
approach provides a low-latency solution while estimating the full nonlinear navigation state.
Our newest navigation algorithm uses Sliding-Window Factor Graphs, which extend existing incremental smoothing methods to operate on the subset of measurements and states that exist inside a sliding time window.
We split the estimation into a fast short-term smoother, a slower but fully
global smoother, and a shared map of 3D landmarks.
A novel three-stage visual feature model is presented that takes advantage
of both smoothers to optimize the 3D landmark map, while minimizing the
computation required for processing tracked features in the short-term
smoother. This three-stage model is formulated based on the maturity of the estimation
of the 3D location of the underlying landmark in the map.
Long-range associations are used as global measurements from matured landmarks
in the short-term smoother and loop-closure constraints in the long-term smoother. Experimental results demonstrate our approach provides highly-accurate
solutions on large-scale real data sets using multiple sensors in GPS denied
settings.
Publications
Han-Pang Chiu, Aveek Das, Philip Miller, Supun Samarasekera, and Rakesh
Kumar,
"Precise Vision-Aided Aerial Navigation",
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS),
2014.
pdf
Han-Pang Chiu, Xun Zhou, Luca Carlone, Frank Dellaert, Supun Samarasekera, and Rakesh Kumar, "Constrained Optimal Selection for Multi-Sensor Robot Navigation Using Plug-and-Play Factor Graphs", IEEE International Conference on Robotics and Automation (ICRA), 2014. pdf
Han-Pang Chiu, Stephen Williams, Frank Dellaert, Supun Samarasekera, and Rakesh Kumar, "Robust Vision-Aided Navigation Using Sliding-Window Factor Graphs ", IEEE International Conference on Robotics and Automation (ICRA), 2013. pdf
Nhon Trinh, Xun Zhou, Han-Pang Chiu, Supun Samarasekera, Rakesh Kumar, "A General Approach to Online Sensor Calibration for Navigation Using Factor Graphs, ION International Technical Meeting, 2013.
Rakesh Kumar, Supun Samarasekera, Han-Pang Chiu, Nhon Trinh, Frank Dellaert, Stephen Williams, Michael Kaess, John Leonard, "Plug-and-Play Navigation Algorithms Using Factor Graphs, Joint Navigation Conference (JNC), 2012.