Realtime State Estimation with tactile and visual sensing. Application to Planar Manipulation.
06/2016-
 Advisor: Alberto Rodriguez
Advisor: Alberto Rodriguez
We developed a realtime object state estimation system based on both tactile and visual cues. This is for reactive manipulation under large occlusion.
Project Website
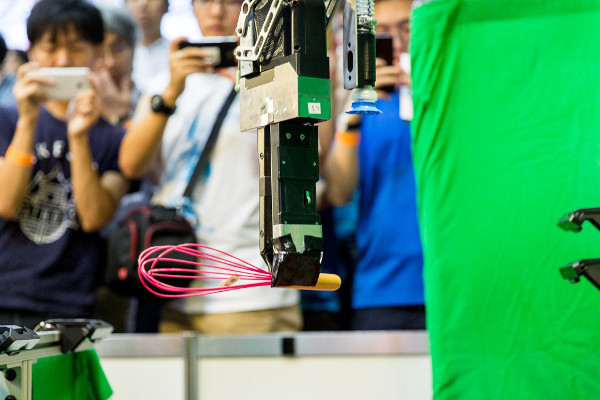
Amazon Robotics Challenge (1st in stowing, 5th in combined), Team MIT-Princeton
06/2017-08/2017
 Team Lead: Alberto Rodriguez
Team Lead: Alberto Rodriguez
Pictures and videos
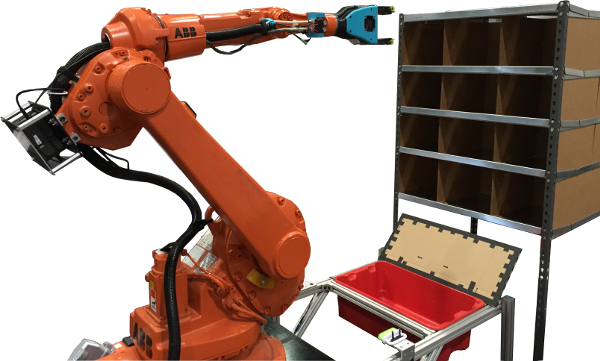
Amazon Picking Challenge (3rd in stowing, 4th in picking), Team MIT-Princeton
01/2016-07/2016
 Team Lead: Alberto Rodriguez
Team Lead: Alberto Rodriguez
Served as software lead and built framework using ROS to integrate perception and motion primitives.
Pictures and videos
More than a Million Ways to Be Pushed: A High-Fidelity Experimental Data Set of Planar Pushing
08/2015-10/2016
 Advisor: Alberto Rodriguez
Advisor: Alberto Rodriguez
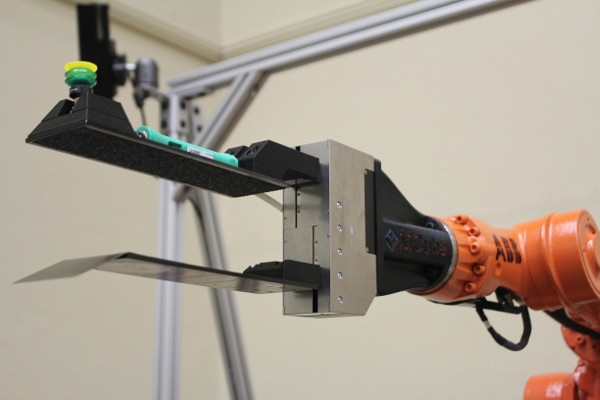
Using an ABB IRB 120 robot arm, a vicon tracking system, and a force torque sensor to collect high fidelity pushing data to study physics-based pushing motion model, and to learn data-driven models.
arXiv Website
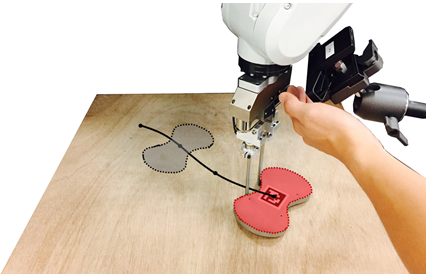
Shape and Pose Recovery from Planar Pushing, MIT MCube Lab
10/2014-
 Advisor: Alberto Rodriguez & John Leonard
Advisor: Alberto Rodriguez & John Leonard
Given a movable planar object on the table, how to find its shape with only one finger attached to a robot arm?
Paper Experiment Video IROS Talk Video
Amazon Picking Challenge (second place), Team MIT
01/2015-06/2015
 Team Lead: Alberto Rodriguez
Team Lead: Alberto Rodriguez
Served as perception and software lead.
Summary and video
DARPA Robotics Challenge, Team MIT
09/2013-01/2015
Team Lead: Russ Tedrake
Exploited tactile sensor, and camera on hand to improve grasping.
Team website
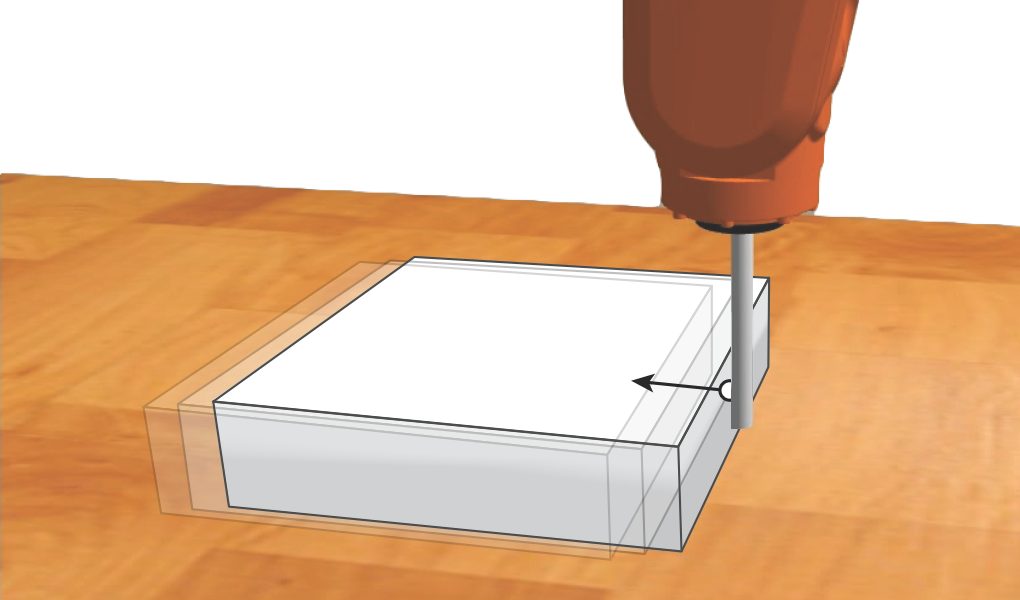
Trajectory Optimization of Dynamic Object Pushing, MIT 6.832 Underactuated Robotics
01/2015
Explore the method of direct trajectory optimization on a dynamic pushing problem, i.e. how to control a pusher to push an object to a target state. Report
GoSpark, MIT 6.824
01/2015-06/2015
Programmed Spark using Go Programming language and applied to K-Means clustering of images. Served as team lead. Report Code
Manhattan World Stereo Reconstruction, MIT 6.869 Final Project
12/2013
Using Manhattan-world assumption to reconstruct surfaces from multiple monocular images.
Report Code
Context-Aware Office Service Robot, NTU
09/2011-07/2012
Supervisor: Prof. Li-Chen Fu / Funded by National Science Council of Taiwan Proposed learning based representation for object recognition. Developed methods to infer human context in office environment; proposed human context mapping to record human living pattern (Master Thesis) Video1: Context Mapping Video2: Office Robot Provides Context-Aware Service
vSLAM – Simultaneous Localization and Mapping using monocular camera, NTU
2010-2011
Supervisor: Prof. Li-Chen Fu / Funded by Industrial Technology Research Institute of Taiwan Improved vSLAM algorithm by fusing Multi-camera and GPU parallelization (ISR 2012). Proposed feature selection strategy based top-down and bottom-up saliency (CVGIP 2011) Video1: Experiment
Mobile Robotics Homework, NTU
Instructor: Prof. Chieh-Chih Wang, Textbook: Probabilistic Robotics by Sebastian Thrun et al. EKF localization report Sensor Fusion Bearing-Only SLAM, FastSLAM
DogBOT - Robotics Intro Class Final Project, NTU
2011
Built a robot that can interact with users using gestures and chase a ball Served as team leader and implemented ball tracking program using camshift algorithm Awarded 1st place out of 8 teams in the on-site demonstration
 Video1: Gesture Recognition
Video2: Human Following
Video3: Ball Chasing
Presentation /
Report
Video1: Gesture Recognition
Video2: Human Following
Video3: Ball Chasing
Presentation /
Report
Multi-label classification with missing data - Machine Learning Class Final Project, NTU
2011
Instructor: Prof. Hsuan-Tien Lin, Textbook: Learning from Data, Abu-Mostafa et al. Applied SVM, random forest, voting, regression on the classification problem Ranked 3rd out of 42 teams on the Hamming Loss track Report
Chirp - Mobile Voice Blogging System, Senior Project, NCTU
2009
Supervisor: Prof. John Kar-kin Zhao / Funded by National Science Council of Taiwan Developed a voice sharing, and recognition system using Android Client and .NET Server. Awarded 1st Place in The 14th Taiwan Collegiate Information Service Innovation Competition Video1: Concept Introduction (Chinese) Video2: Demo
SEEDS - Solar Energy-based Embedded Distributed Server farm, Sophomore Project, NCTU
2007-08
Supervisor: Prof. Shiao-Li Tsao / Funded by National Science Council of Taiwan Advanced into the final 200 teams in Microsoft Imagine Cup Embedded system competition Proposal
Vision - a self-developed 3D graphics engine and interface, High School Project, NCTU
2007-08
Awarded 2nd Prize and Intel Excellence in Computer Science Award in Taiwan International Science Fair
Taipei 101 Rendered by my Program