#include <base_2D.h>
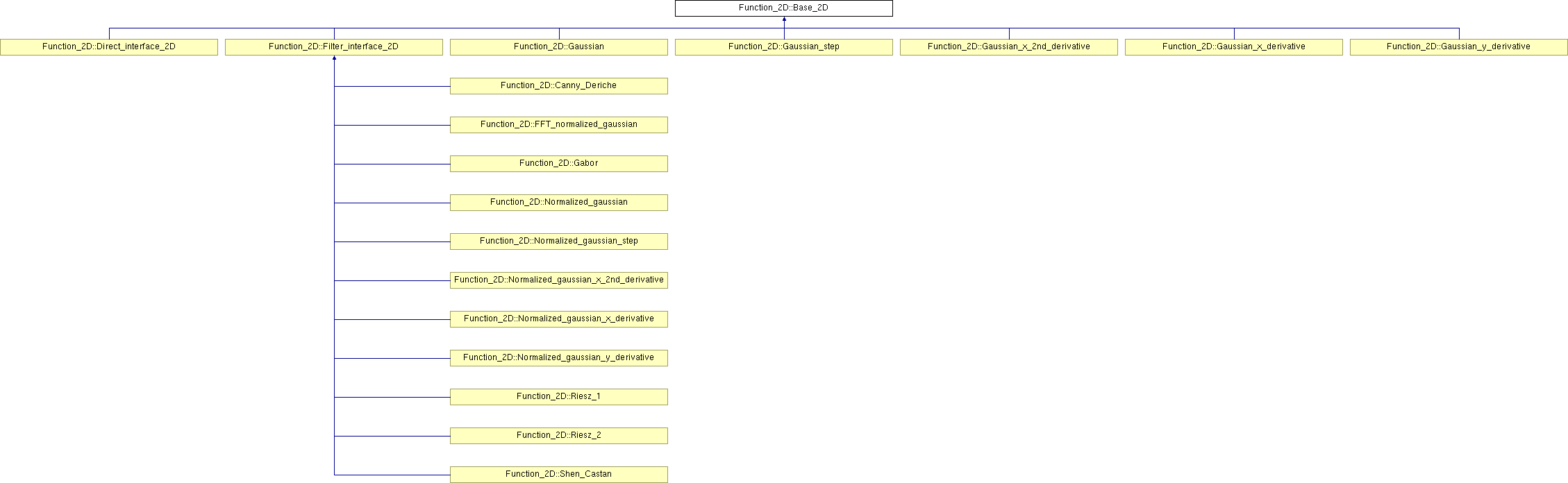
Inheritance diagram for Function_2D::Base_2D:
Public Types | |
| typedef double | real_type |
Public Methods | |
| Base_2D (const real_type in_offset_x=0, const real_type in_offset_y=0, const real_type in_scale_x=1, const real_type in_scale_y=1, const real_type in_rotation_angle=0, const real_type out_offset=0, const real_type out_scale=1) | |
| virtual | ~Base_2D () |
| real_type | operator() (const real_type x, const real_type y) const |
Protected Methods | |
| virtual real_type | base_value_proxy (const real_type x, const real_type y) const=0 |
| void | update_input_rotation (const real_type a) |
Protected Attributes | |
| real_type | input_rotation_angle |
| real_type | output_scale |
| The output value is scaled by this value before being translated. | |
| real_type | output_offset |
| The output value is translated by this value after scaling. | |
| real_type | input_offset_x |
| real_type | input_offset_y |
| real_type | input_scale_x |
| real_type | input_scale_y |
| real_type | cos_a |
| (Co)sine of the input rotation angle. | |
| real_type | sin_a |
| (Co)sine of the input rotation angle. | |
Must be derived to define the base_value_proxy() function. One should consider defining a static base_value() and to code as following:
// virtual inline Gaussian::real_type Gaussian::base_value_proxy(const real_type x, const real_type y) const{ return Gaussian::base_value(x,y); } // static inline Gaussian::real_type Gaussian::base_value(const real_type x, const real_type y){ return exp(-(x*x + y*y)); }
|
|
|
|
||||||||||||||||||||||||||||||||
|
|
|
|
|
|
||||||||||||
|
||||||||||||
|
|
|
|
|
|
|
(Co)sine of the input rotation angle.
|
|
|
This value is added to the corresponding input coordinate before rotation and scaling. |
|
|
This value is added to the corresponding input coordinate before rotation and scaling. |
|
|
The input coordinates are rotated by this angle after being translated and before being scaled. |
|
|
This value is used to scale the corresponding input coordinate after rotation and offset. |
|
|
This value is used to scale the corresponding input coordinate after rotation and offset. |
|
|
The output value is translated by this value after scaling.
|
|
|
The output value is scaled by this value before being translated.
|
|
|
(Co)sine of the input rotation angle.
|
 1.2.18
1.2.18