- reported measurements are not monotonic with distance;
- the distribution of repeated measurements for the same position often is not unimodel;
- the “measurement noise” varies with positions;
- there are “outliers” (measurements off by several meters);
- objects outside the direct line of sight may affect the measurement;
- building materials with high relative permitivitty will bias measurements;
- there is a systematic offset that is different for different initiators and responder (and depends on the choice of bandwidth and preamble);
- there are large “position-dependent” errors.
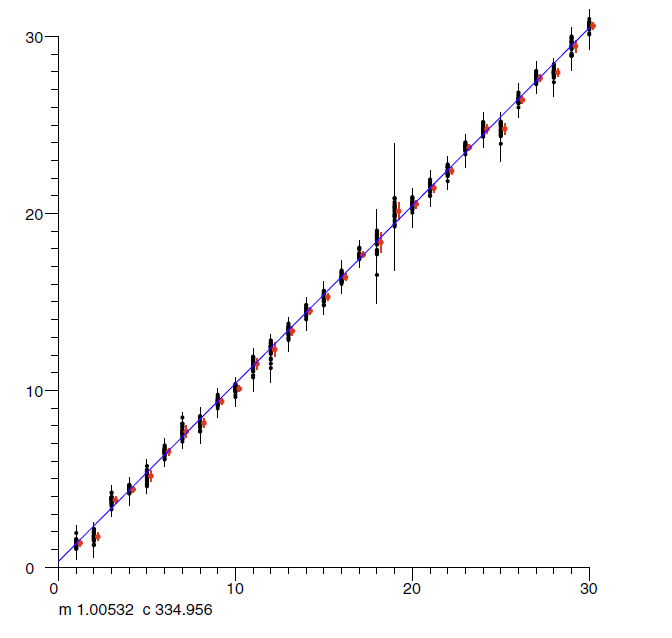
It should be apparent that the standard deviation measured in a fixed position, even with a clear line of sight, is not really useful when it comes to estimating the expected error. The reported distance measurement and standard deviation vary for various reasons, including small movements of the hand-held smartphone. Note, however, that the variation in reported distance is of the order of a meter, which presumably is very much larger than the actual motion of the hand-held phone. Some combinations of intiator and responder have relatively high fluctuations when in a fixed position, yet do not have much larger errors in real-world measurement than others.
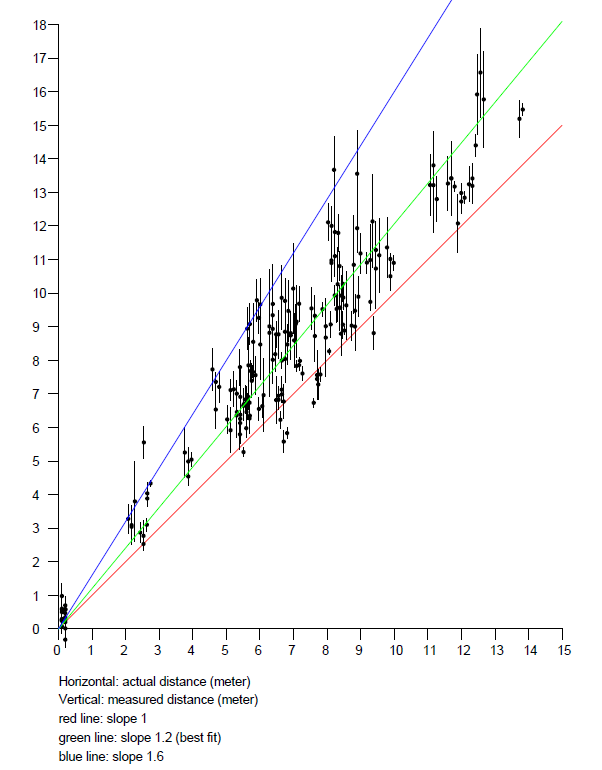
Finally, it is important to note that the error in distance measurement does not equal the accuracy of position determination. This is because of “dilution of precision” which depends on the geometric arrangement of responders with respect to the intiator. Here an accuracy of two meters is more common (ignoring the occasional complete outlier). See also Where to place the responders and Recovering position from distance measurements
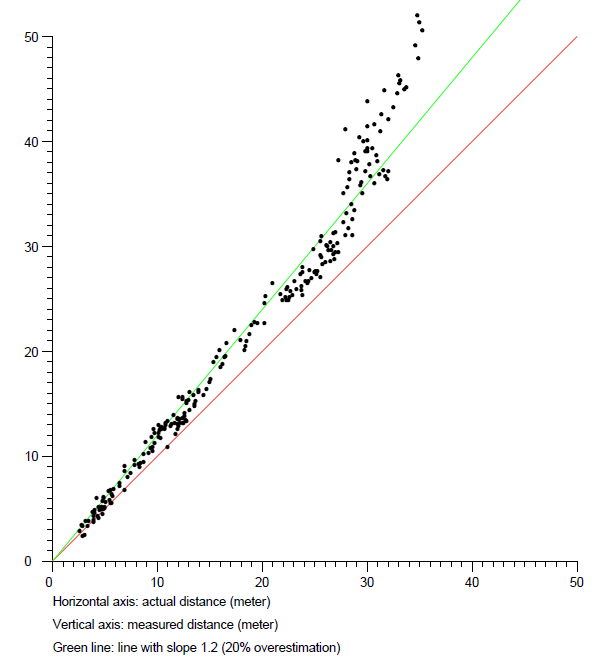
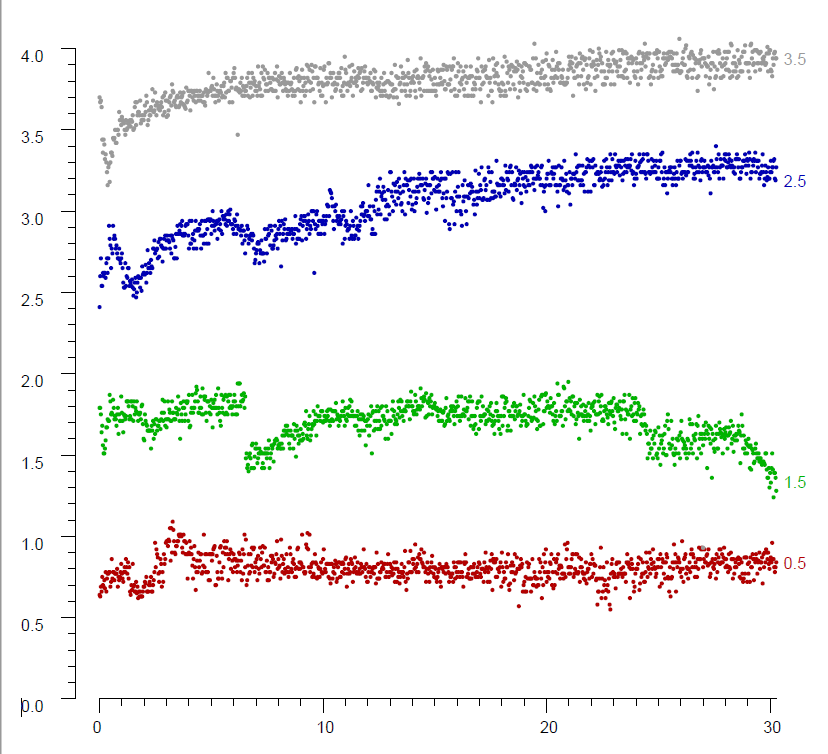
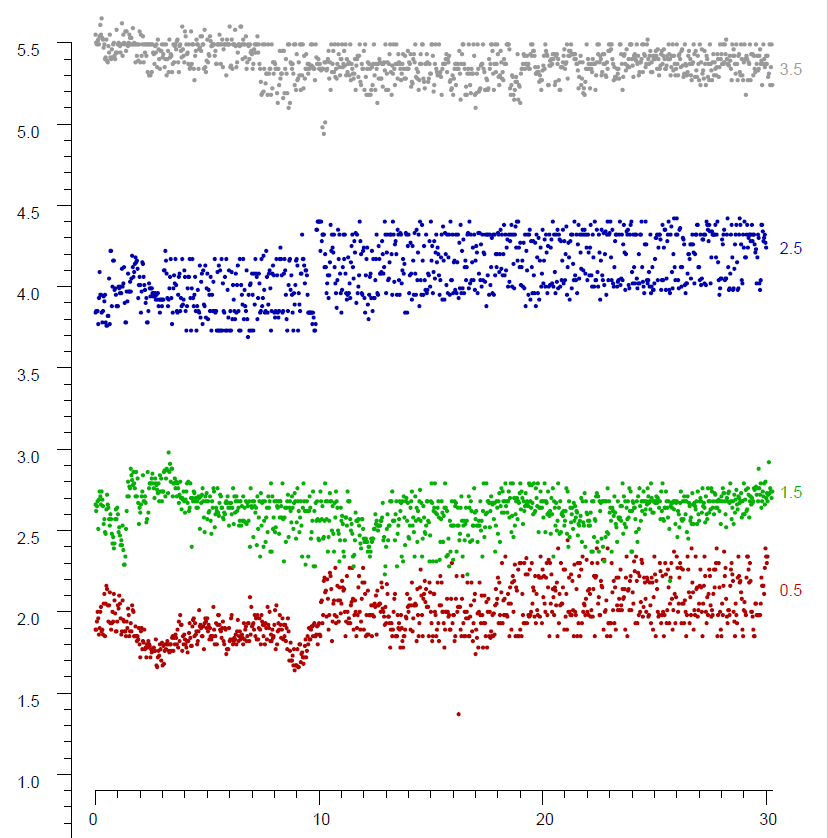
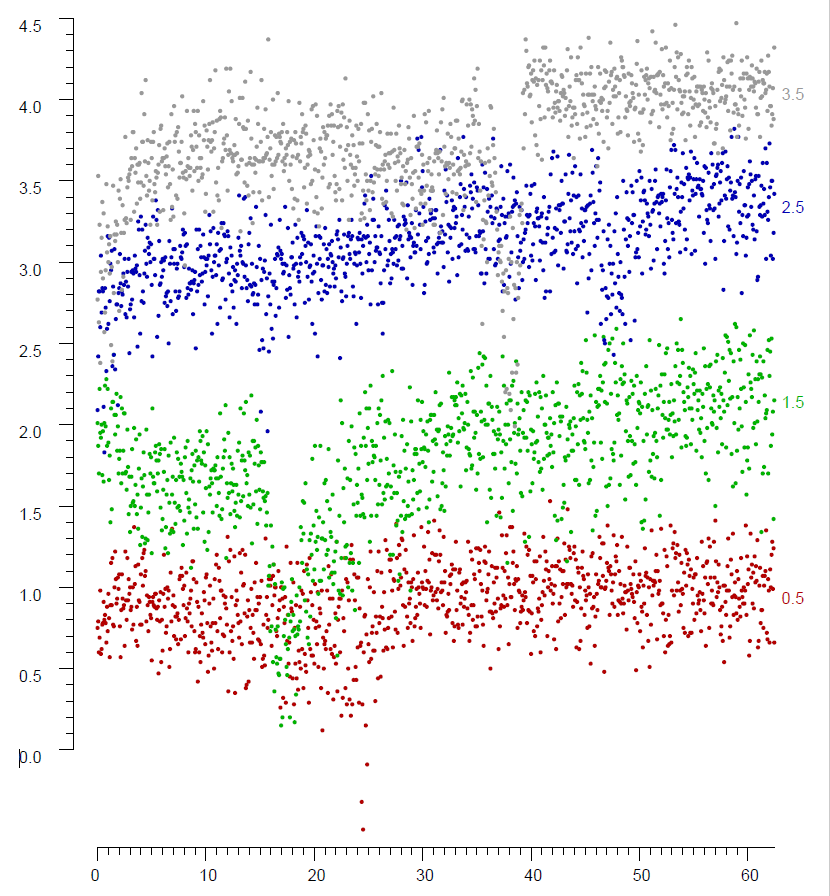
On the right, sample results from a relatively open office environment (cubicle layout, single level). Averages over 10 RTT bursts (of 7 measurements each) are shown. Here the line of sight (LOS) is maintained over much larger distances than in the typical home. Note that measurements are biased (generally equal to or greater than the actual distance) and get less reliable with distance.
It may be helpful to note that the RTT measurement is not “distance” per se, but a quantity obtained by multiplying the round trip time (RTT) by the speed of light (and dividing by two). The round trip time in turn is proportional to the integral of the square root of the relative permittivity (ε) along the signal path. So the “distance” measurement reported is the distance between an initiator and a responder that would have resulted in the same round trip time, had there been a clear line of sight between them – in air.
Why is the measurement so inaccurate even with a clear line of sight?
Actually, the real questions is “Why is the measurement so accurate”! (*):At 80 MHz RF bandwidth (the highest currently supported in all but one or two AP models), the signal is sampled by an analog-to-digital converter (ADC) 80 million times per second (actually both I and Q channels are sampled, for a total of 160 million samples per second, but that doesn't affect the argument here). That means that the ADC samples every 12.5 nano-seconds. If distance were determined simply by which sample had the very beginning of the preamble symbols, then the expected accuracy would be 3.75 meter in round trip distance, or 1.875 meter one way. The device actually produces results with finer resolution than that because of the use of some form of interpolation or “super-resolution” that provides sub-sample resolution in time. These heuristic methods each have their own foibles, but it is hard to say more since the method used in a particular WiFi chip is information that the user does not have access to.