
| Research | Publications | Courses | Administrative | Home |
|
|
|
The ability to balance in single support (while standing on one leg) is an important requirement for walking and other bipedal locomotion tasks. I have developed a control algorithm that provides enhanced flexibility and robustness in the control of balancing while standing on one leg by coordinating the exertion of stance leg ankle torques with movement of non-contact limbs. Current approaches to balance control generally assume the presence of explicitly specified joint reference trajectories or desired virtual forces and calculations based on static body configurations to derive the necessary actuator torques. The former approach has limited robustness, the latter does not account for, or take advantage of forces that could be produced by body motion independent of ground contact. The new controller improves on these limitations through the following key architectural features:
I have tested the controller with a morphologically realistic, 3-dimensional, 18 degree-of-freedom humanoid model serving as the plant. The controller can use less detailed control targets, and reject stronger disturbances, than a previously implemented controller based on desired virtual forces and static body calculations. For more details, see "A Sliding Controller for Bipedal Balancing Using Integrated Movement of Contact and Non-Contact Limbs" (IROS 2004). For additional background, see "Zero Spin Angular Momentum Control: Definition and Applicability" (Humanoids 2004). |
Lateral Disturbance Rejection Test
|
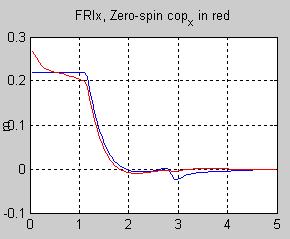
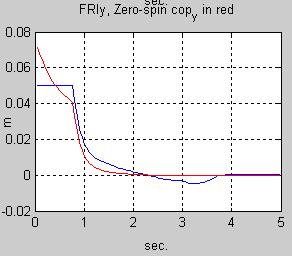
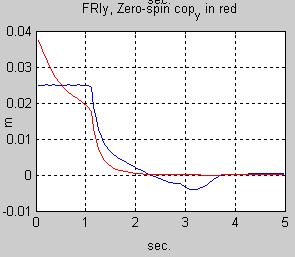
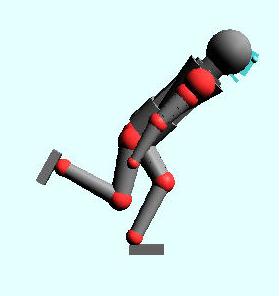
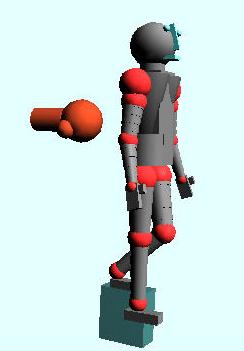
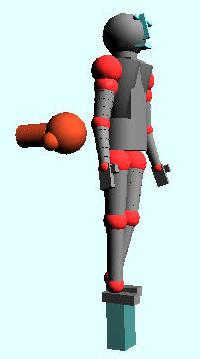
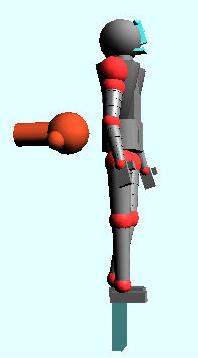
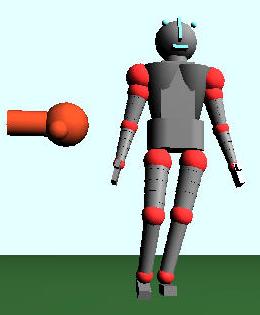
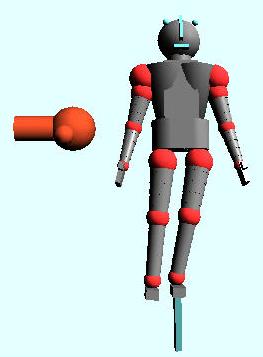
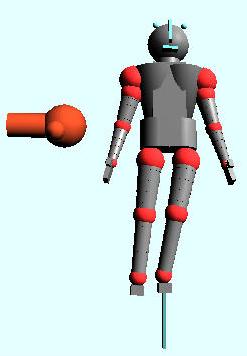
The following figures show the behavior of the system in response to an initial condition where the ground projection of the COM is outside the lateral bounds of the support polygon. For such initial conditions, the COM cannot be stabilized by stance ankle torques alone (without having the foot roll). A reference trajectory consisting of a single setpoint was input to the controller. This setpoint specified desired position and velocity for COM and the other outputs. The figures show compensating motion of non-contact limbs (swing leg and body), which, when combined with the limited stance ankle torques, succeeds in stabilizing the system. |
 |
Movie (Quicktime, AVI) |
|
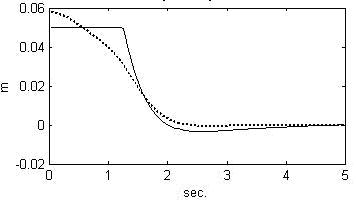
The dotted line shows lateral COM position, the solid line shows FRI (foot rotation index). The boundary of the support polygon is at 5 cm. As can be seen from the plots, the COM begins outside this boundary, while the FRI stays inside it (so that the stance foot doesn't roll). |
Forward Disturbance Rejection Test
|
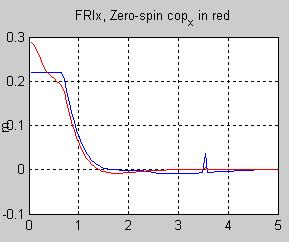
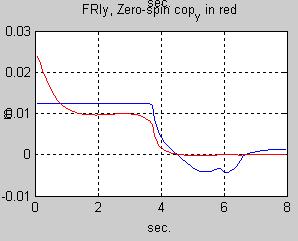
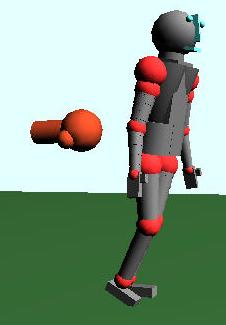
The following figures show the behavior of the system in response to an initial condition where the ground projection of the COM is outside the forward bounds of the support polygon. Setpoints are the same as for the previous test. |
 |
Movie (Quicktime, AVI) |
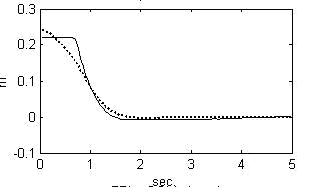
| The dotted line shows lateral COM position, the solid line shows FRI (foot rotation index). The boundary of the support polygon is at 22 cm. As can be seen from the plots, the COM begins outside this boundary, while the FRI stays inside it (so that the stance foot doesn't pitch). |
Forward and Lateral Disturbance Rejection Test
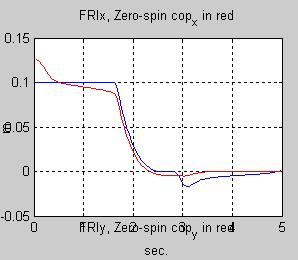
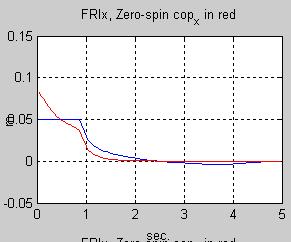
| The following figures show the behavior of the system in response to an initial condition where the ground projection of the COM is outside the forward and lateral bounds of the support polygon. Setpoints are the same as for the previous test. |
 |
Movie (Quicktime, AVI) |
Additional Tests
 |
Forward disturbance, standing on ground (Quicktime, AVI) Swing leg must bend enough so that swing foot clears ground.
|
 |
Forward disturbance, standing on podium (Quicktime, AVI) Podium is larger than foot.
|
 |
Forward disturbance, standing on small podium (Quicktime, AVI) Podium is shorter than foot.
|
 |
Forward disturbance, standing on even smaller podium (Quicktime, AVI) Podium is much shorter than foot.
|
 |
Lateral disturbance, standing on ground (Quicktime, AVI) Swing leg must bend enough so that swing foot clears ground.
|
 |
Lateral disturbance, standing on narrow podium (Quicktime, AVI) Podium is narrower than foot.
|
 |
Lateral disturbance, standing on podium (Quicktime, AVI) Podium is larger than foot.
|

Motion capture system is used to collect joint trajectories and forces for normal walking. |
Conservation of angular momentum principles (see "Angular Momentum Regulation during Human Walking: Biomechanics and Control", ICRA 2004) are used to predict COP from COM. |
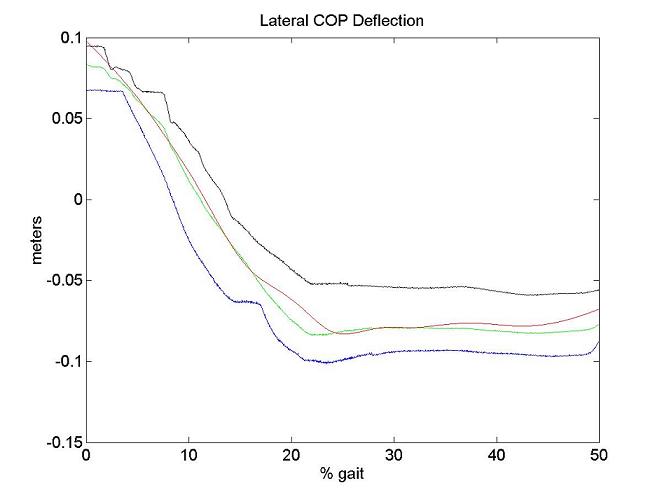
Green plot is biological trajectory, red is model prediction
COP, COM trajectories are reference inputs for space-time dynamic optimization algorithm that computes joint trajectories. For more details on this algorithm, see Jovan Popovic's web site. |
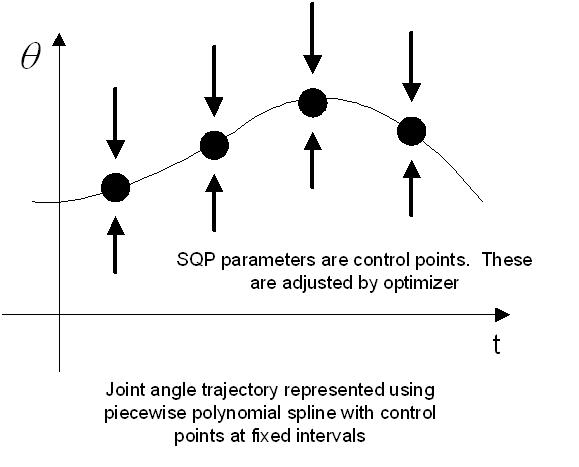
Integrated Motion Planning and Control
|
|
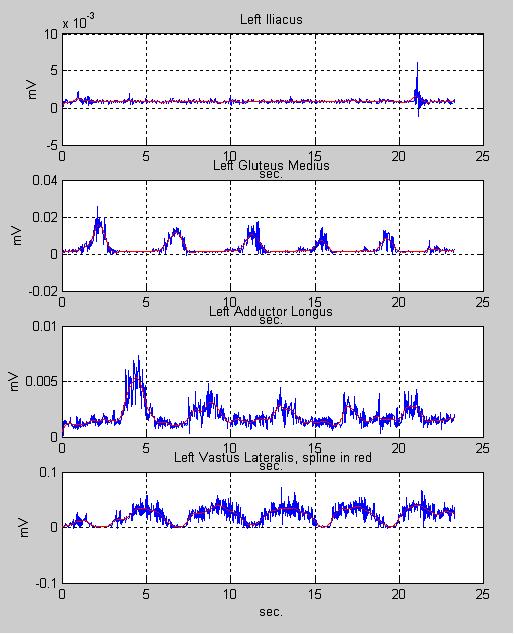
The capability to infer body and leg movement from EMG (Electro-Myography) signals detected by surface sensors attached to a subject’s legs is useful for a variety of applications. Such a capability could be used by a human subject (pilot) to control an exo-skeleton that greatly amplifies the strength and speed of the pilot’s biological body. The pilot would be situated inside the exo-skeleton, which ideally, could be worn comfortably as a kind of suit. More generally, the exo-skeleton may be a mechanism much larger than the pilot, with the pilot being situated in a control cabin in the “head”. Exo-skeletons could be used in a variety of construction applications, military applications, and in general, applications requiring handling of hazardous or heavy materials. Such exo-skeletons can also be adapted for use as powered orthotics, which allow people with muscular weakness or related disabilities to walk more normally, and for use as powered prosthetic devices that replace lost biological limbs. The following diagram shows EMG signals for a sequence of double-support
swaying movements. |
|
As can be seen, the EMG signals contain significant measurement noise.
Model-based filtering techniques, such as extended Kalman filtering, can
be used to separate the signal from the noise. A simplified biological
model relating EMG signals to motor actuation force, and to the high-level
motor command (user intent) is shown in the following diagram. |
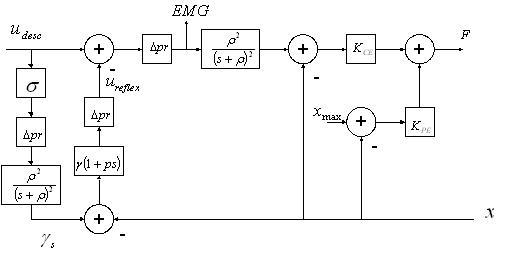
| This model can be augmented with dynamic models, of the type described previously, that model the relation between F and x (force and position). Using these model-based filtering techniques, the following goals are addressed:
The following diagram shows a lateral force prediction based on an EMG signal test set. |
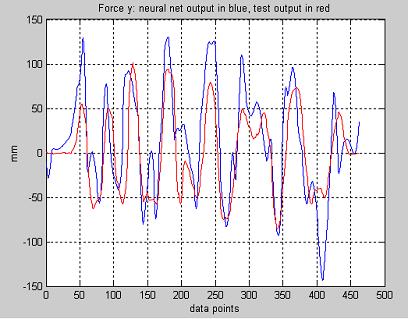
The red plot shows the true value, the blue plot shows the prediction.
|
| Troody is a dinosaur robot built by Peter Dilworth. I assisted Peter with development of a balance control system for Troody that integrates input from Troody's gyroscope and linear accelerometer sensors. |