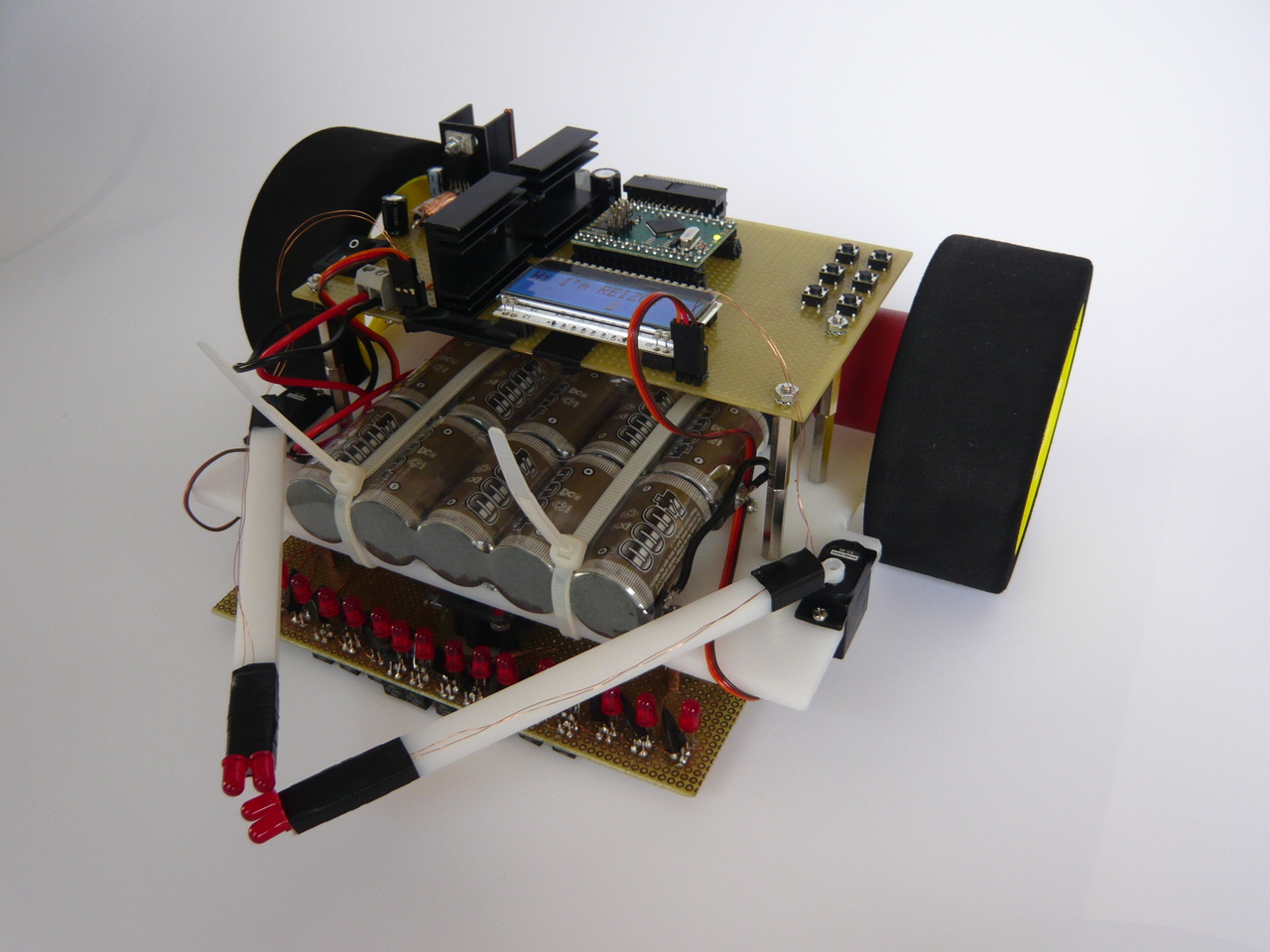
rEIzor
I lead the development of a fast line-following robot. The robot achieved nearly 1 m/s on the line while handling branches and intersections. Our team won the final competition at TUM within the AdvEIsor program against five other teams.
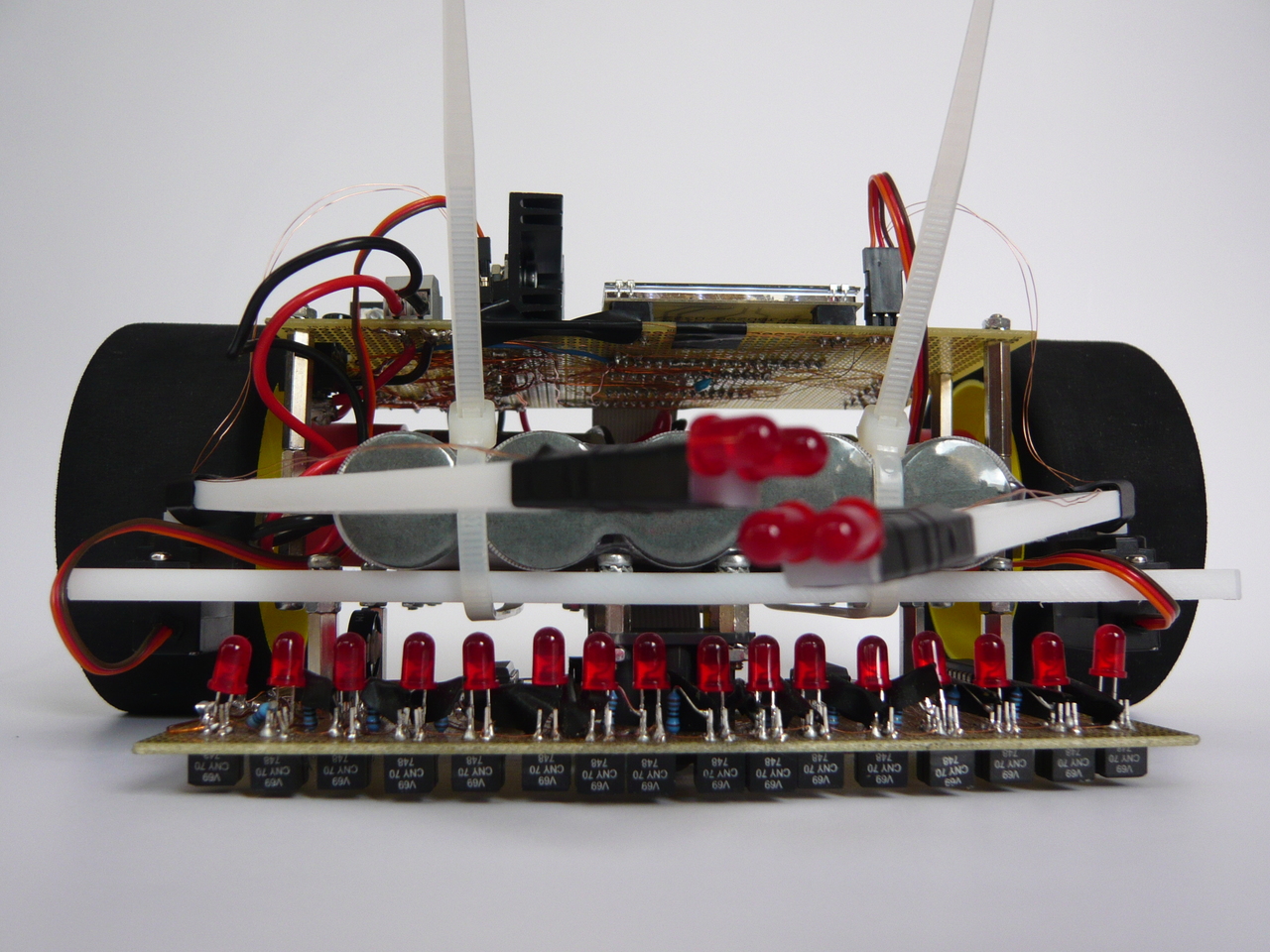




rEIzor with well tuned PID controller for line-following a couple of days before the competition. The line-sensor makes for some pretty neat light effects.