Projects
Here are some of my current and past projects at MIT. For my earlier work, please see my Georgia Tech web page.Kintinuous: Live Dense Mapping
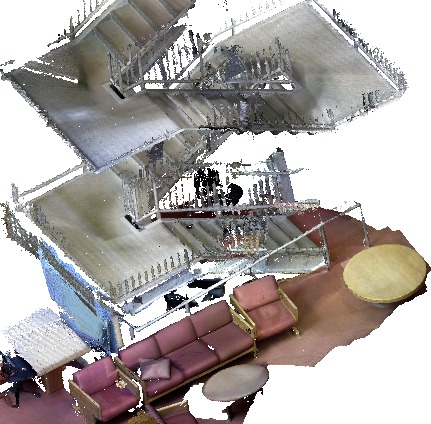 Kintinuous
provides live dense 3D mapping of extended environments using RGB-D
sensors such as Microsoft's Kinect. Unlike the
original KinectFusion
algorithm, we are not restricted to a small volume by the available
memory on the GPU. Instead, the volume moves through space along with
the observer, and a triangular mesh is created for slices that leave the
volume. We also combine ICP-based tracking with dense color
information to achieve robust tracking in a large variety of
environments. Kintinuous has mostly been implemented
by Tom
Whelan, a gifted GPU programmer and PhD student at the National
University of Ireland Maynooth under the supervision
of John McDonald. An
initial publication
has appeared in the RGB-D workshop at RSS 2012.
Kintinuous
provides live dense 3D mapping of extended environments using RGB-D
sensors such as Microsoft's Kinect. Unlike the
original KinectFusion
algorithm, we are not restricted to a small volume by the available
memory on the GPU. Instead, the volume moves through space along with
the observer, and a triangular mesh is created for slices that leave the
volume. We also combine ICP-based tracking with dense color
information to achieve robust tracking in a large variety of
environments. Kintinuous has mostly been implemented
by Tom
Whelan, a gifted GPU programmer and PhD student at the National
University of Ireland Maynooth under the supervision
of John McDonald. An
initial publication
has appeared in the RGB-D workshop at RSS 2012.
Building-Scale Lifelong Mapping
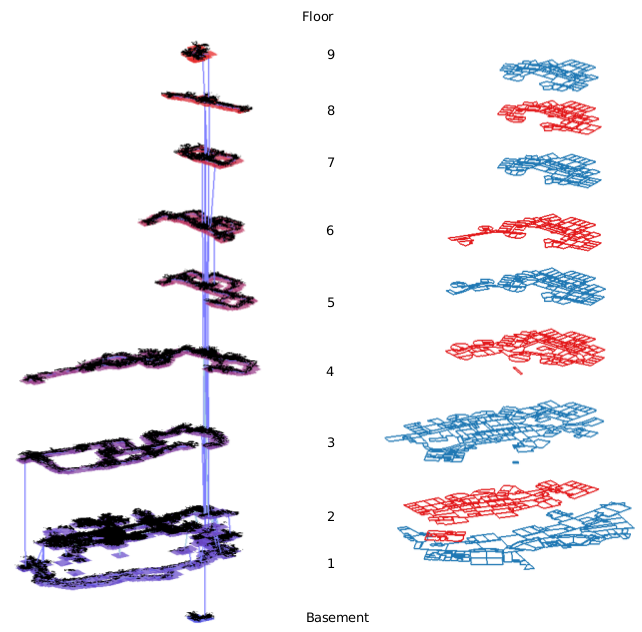 In recent work we created a map of our ten floor building, the
Stata
Center. We used stereo vision and odometry from our PR2 robot to
create the map. Keeping the optimization efficient during long-term
operation is a challenging problem that we approach using the reduced
pose graph formulation
by Hordur
Johannsson. His animation below shows the map being created for a
significant portion of the building, covering a cumulative 10 hours of
operation during which the robot traveled 11 km through the
building. An
initial publication
has appeared in the long-term operation workshop at RSS 2012.
In recent work we created a map of our ten floor building, the
Stata
Center. We used stereo vision and odometry from our PR2 robot to
create the map. Keeping the optimization efficient during long-term
operation is a challenging problem that we approach using the reduced
pose graph formulation
by Hordur
Johannsson. His animation below shows the map being created for a
significant portion of the building, covering a cumulative 10 hours of
operation during which the robot traveled 11 km through the
building. An
initial publication
has appeared in the long-term operation workshop at RSS 2012.
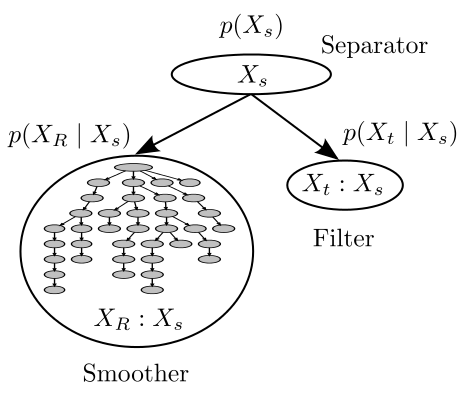
iSAM2 and the Bayes Tree
 Exploring the connection of sparse linear algebra and graphical
models yielded new insights into the probabilistic interpretation
of matrix factorization, formalized in the Bayes tree
(WAFR10 paper). Based on this
insight, we developed a novel incremental nonlinear optimization
algorithm for sparse least-squares problems called iSAM2
(IJRR12 paper). Our newest
development is an incremental version of Powell's dog leg method that
provides guaranteed convergence (at least to a local minimum) and
extends iSAM2 to non-Gaussian noise models
(ICRA12 paper).
Exploring the connection of sparse linear algebra and graphical
models yielded new insights into the probabilistic interpretation
of matrix factorization, formalized in the Bayes tree
(WAFR10 paper). Based on this
insight, we developed a novel incremental nonlinear optimization
algorithm for sparse least-squares problems called iSAM2
(IJRR12 paper). Our newest
development is an incremental version of Powell's dog leg method that
provides guaranteed convergence (at least to a local minimum) and
extends iSAM2 to non-Gaussian noise models
(ICRA12 paper).
Ship Hull Inspection
 We integrated localization and mapping with closed loop control
of an autonomous underwater vehicle for in-water inspection of large
ships. In addition to standard sensors of mobile robotics such as a
ring laser gyro, our Hovering Autonomous Underwater Vehicle (HAUV)
also includes a doppler velocity log (DVL) and an imaging sonar. This
work is funded by the Office of
Naval Research (ONR). This is joint work
with Franz
Hover in Ocean
Engineering
and Ryan Eustice at
the University of Michigan, Ann Arbor, and involves several students:
Hordur
Johannsson, Brendan
Englot
and Ayoung
Kim. Our IJRR journal
submission just got accepted, more details soon. Further links can be found here.
We integrated localization and mapping with closed loop control
of an autonomous underwater vehicle for in-water inspection of large
ships. In addition to standard sensors of mobile robotics such as a
ring laser gyro, our Hovering Autonomous Underwater Vehicle (HAUV)
also includes a doppler velocity log (DVL) and an imaging sonar. This
work is funded by the Office of
Naval Research (ONR). This is joint work
with Franz
Hover in Ocean
Engineering
and Ryan Eustice at
the University of Michigan, Ann Arbor, and involves several students:
Hordur
Johannsson, Brendan
Englot
and Ayoung
Kim. Our IJRR journal
submission just got accepted, more details soon. Further links can be found here.
Visual SLAM
 Multi-session visual mapping in large-scale environments using anchor
nodes to connect multiple pose graphs (ECMR11
paper). One motivation is robustness to failures by
restarting and eventually merging with the original map. A key
component of the system is an improved appearance based loop closure
technique. This is joint work
with John
McDonald at the National University of Ireland, Maynooth,
and Jose Neira
and Cesar Cadena at
the University of Zaragoza, Spain.
Multi-session visual mapping in large-scale environments using anchor
nodes to connect multiple pose graphs (ECMR11
paper). One motivation is robustness to failures by
restarting and eventually merging with the original map. A key
component of the system is an improved appearance based loop closure
technique. This is joint work
with John
McDonald at the National University of Ireland, Maynooth,
and Jose Neira
and Cesar Cadena at
the University of Zaragoza, Spain.
All Source Positioning and Navigation (ASPN)
 This is a joint project with Georgia
Tech and Sarnoff/SRI
International sponsored by DARPA. Its goal is to combine low
latency filtering methods with the loop closing capabilities of
current smoothing solutions to the SLAM problem. The Bayes tree has
proven essential for the algorithmic development, and iSAM2 is also
being used. Here are some initial publications on
concurrent smoothing and
filtering and on smoothing
with IMUs.
This is a joint project with Georgia
Tech and Sarnoff/SRI
International sponsored by DARPA. Its goal is to combine low
latency filtering methods with the loop closing capabilities of
current smoothing solutions to the SLAM problem. The Bayes tree has
proven essential for the algorithmic development, and iSAM2 is also
being used. Here are some initial publications on
concurrent smoothing and
filtering and on smoothing
with IMUs.
Cooperative Mapping and Localization
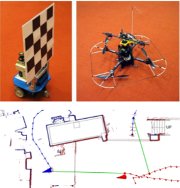 We introduced the concept of anchor nodes for combining
initially independent pose graphs of multiple robots upon pair-wise
encounters. One application was the cooperative mapping of a large
underground loading dock by a quadrotor and a ground robot. A
paper with my
student Been
Kim appeared in ICRA 2010. The concept of anchor nodes has since
found a range of applications, including for visual SLAM (see above).
We introduced the concept of anchor nodes for combining
initially independent pose graphs of multiple robots upon pair-wise
encounters. One application was the cooperative mapping of a large
underground loading dock by a quadrotor and a ground robot. A
paper with my
student Been
Kim appeared in ICRA 2010. The concept of anchor nodes has since
found a range of applications, including for visual SLAM (see above).
Last updated: Nov 4, 2013