


Dr. Michael Kaess
Associate Professor at CMUplease see my CMU page for up-to-date information
Computer Science and Artificial Intelligence Lab (CSAIL)
Massachusetts Institute of Technology (MIT)
32 Vassar St., Room 232
Cambridge, MA 02139
Phone: +1 617 452 2852
email: kaess@mit.edu
My research focuses on probabilistic methods in mobile robotics and computer vision. I am working on inference with large sparse matrices and graphical models, in particular exploring their connections. Solutions to this problem are of interest for robot localization and large-scale mapping. One particular application that I have been working on is the navigation for closed loop control of an autonomous underwater vehicle to inspect the hulls of large ships.
I was a member of the Marine Robotics Lab of John Leonard at MIT. I finished my PhD with Frank Dellaert at Georgia Tech in 2008. My dissertation introduced an efficient algorithm called iSAM for simultaneous localization and mapping (SLAM), which is the problem of mapping a previously unknown environment while at the same time using this map for localization.
Mapping has many important applications, including inspection of underwater structures, indoor navigation for service robots and search-and-rescue scenarios, navigation for autonomous cars and space applications. Here are some recent highlights from my projects:
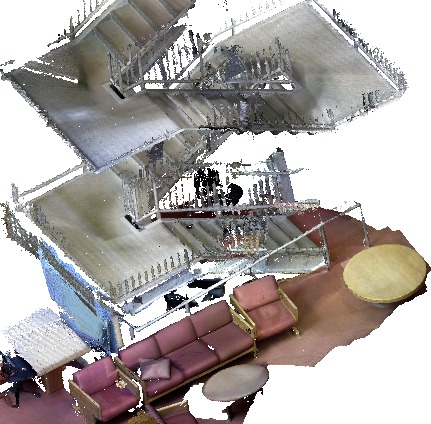
Kintinuous: Live dense 3D modeling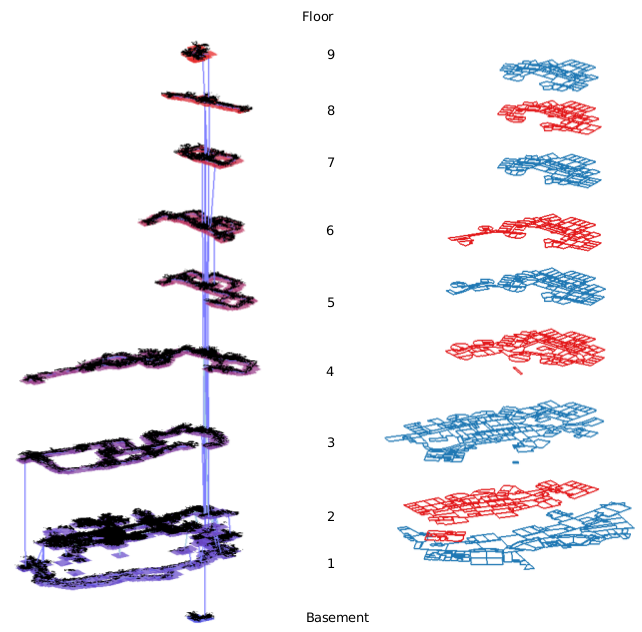
Building-scale mapping and long-term mapping
Ship hull inspection: Closed loop control of underwater robot
Highlights [All News...]
- Nov 2013: I am now an Assistant Research Professor at the Robotics Institute, Carnegie Mellon University.
- Sep 2013: I am Associate Editor for ICRA 2014.
- Aug 2013: Kintinuous was the spotlight feature on the MIT home page on Aug 28: archive and full article.
- Jul 2013: Our IROS paper on deformation-based loop closure for Kintinuous will appear in November.
- Jun 2013: Three ECMR papers accepted: Paul's unscented iSAM and consistent sparsification and Ross' object segmentation
- May 2013: I attended ICRA 2013 in Karlsruhe, Germany, where I gave a tutorial at the Factor Graph Workshop, an invited talk at the Workshop on Long-Term Autonomy, and was coauthor on three conference papers: Tom's robust Kintinuous, Hordur's long-term mapping (nominated for best student paper) and David's non-Gaussian optimization.
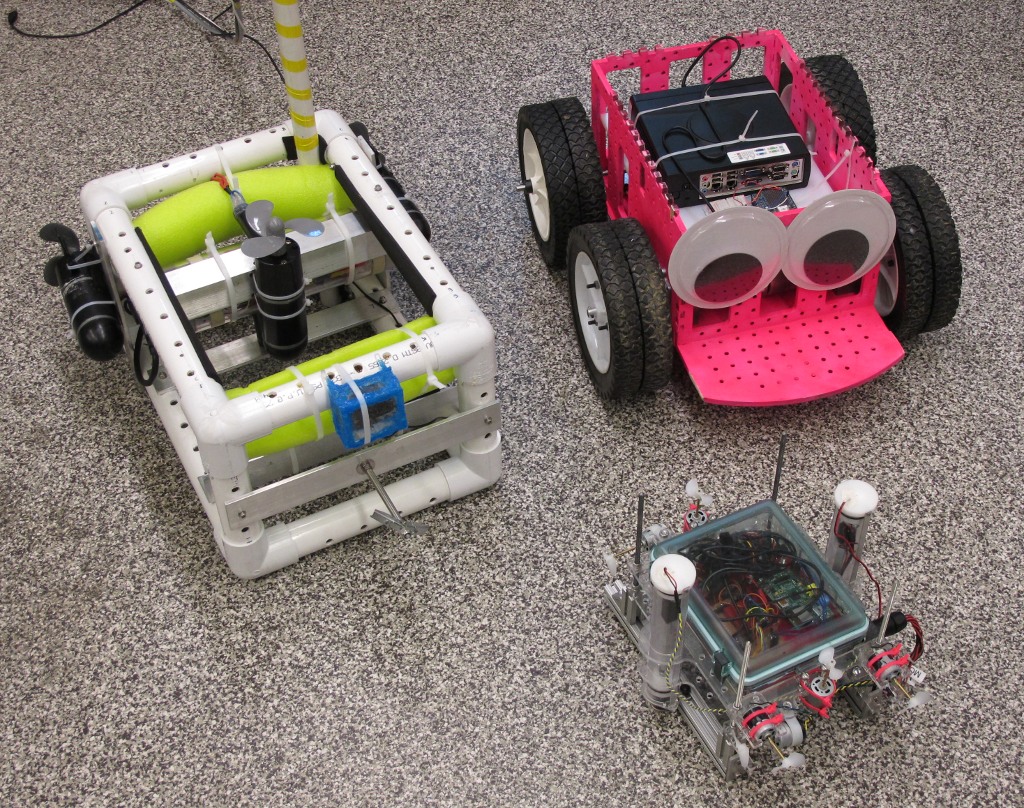
- May 2013: Finished teaching my first class: Here's a picture of two underwater robots and a wheeled robot built by my students in 2.017.
- Feb 2013: I am Associate Editor for IROS 2013 and on the programm committee of RSS 2013.
- Feb 2013: I appeared on Discovery Channel Canada: Here is the 3 minute Daily Planet segment (starts at 22s after the commercial) where I show the host our latest work: Kintinuous.
- Dec 2012: I will be co-teaching 2.017 (Design of electromechanical robotic systems) this spring.
- Sep 2012: Two new journal papers to appear: Multi-session visual SLAM (RAS) and In-water ship hull inspection (IJRR).
- Aug 2012: I was a runner up for the Dick Volz Best 2008 U.S. PhD thesis award in robotics and automation.
- May 2012: Check out Kintinuous: Our submission to the RGB-D workshop at RSS 2012.
- Apr 2012: We have two papers in FUSION 2012: concurrent smoothing and filtering and inertial navigation with factor graphs.
- Mar 2012: A new, much improved version (1.6) of my iSAM library has been released, featuring Powell's dog leg, stereo support, Quaternions, Eigen...
- Jan 2012: Check out our paper on robust incremental least-squares in ICRA 2012 using an incrementalized version of Powell's dog leg.
- Jul 2011: I organized the Automated SLAM Evaluation Workshop at RSS 2011 together with Giorgio Grisetti and Kai Ni. Many thanks to all the speakers for their very interesting talks and to the audience for their active participation!
- Aug 2010: Check out my open source code for iSAM, now available here under the LGPL license. Includes full documentation, a few datasets and a 3D viewer.
{kind=link}
Selected Publications [All Publications...]
“Deformation-based Loop Closure for Large Scale Dense RGB-D SLAM” by T. Whelan, M. Kaess, J.J. Leonard, and J.B. McDonald. In IEEE/RSJ Intl. Conf. on Intelligent Robots and Systems, IROS, (Tokyo, Japan), Nov 2013. Details. Download: PDF.“An Incremental Trust-Region Method for Robust Online Sparse Least-Squares Estimation” by D.M. Rosen, M. Kaess, and J.J. Leonard. In IEEE Intl. Conf. on Robotics and Automation, ICRA, (St. Paul, MN), May 2012. Details. Download: PDF.
“iSAM2: Incremental Smoothing and Mapping Using the Bayes Tree” by M. Kaess, H. Johannsson, R. Roberts, V. Ila, J.J. Leonard, and F. Dellaert. Intl. J. of Robotics Research, IJRR, vol. 31, Feb. 2012, pp. 217-236. Details. Download: PDF.
“Multiple Relative Pose Graphs for Robust Cooperative Mapping” by B. Kim, M. Kaess, L. Fletcher, J.J. Leonard, A. Bachrach, N. Roy, and S. Teller. In IEEE Intl. Conf. on Robotics and Automation, ICRA, (Anchorage, Alaska), May 2010, pp. 3185-3192. Details. Download: PDF.
“Covariance Recovery from a Square Root Information Matrix for Data Association” by M. Kaess and F. Dellaert. Journal of Robotics and Autonomous Systems, vol. 57, Dec. 2009, pp. 1198-1210. Details. Download: PDF.
“iSAM: Incremental Smoothing and Mapping” by M. Kaess, A. Ranganathan, and F. Dellaert. IEEE Trans. on Robotics, vol. 24, no. 6, Dec. 2008, pp. 1365-1378. Details. Download: PDF.
“Square Root SAM: Simultaneous Localization and Mapping via Square Root Information Smoothing” by F. Dellaert and M. Kaess. Intl. J. of Robotics Research, vol. 25, no. 12, Dec. 2006, pp. 1181-1204. Details. Download: PDF.
“MCMC-based Multiview Reconstruction of Piecewise Smooth Subdivision Curves with a Variable Number of Control Points” by M. Kaess, R. Zboinski, and F. Dellaert. In Eur. Conf. on Computer Vision, ECCV, (Prague, Czech Republic), May 2004, pp. 329-341. Acceptance ratio 34.2% (190 of 555). Details. Download: PDF.