Publications by categories in reverse chronological order. See Google Scholar for an up-to-date list.
Theses
2019
-
Robust Non-Gaussian Semantic Simultaneous Localization and Mapping
Kevin Doherty
2019
S.M. Thesis
2017
-
Learning-aided 3D Occupancy Mapping for Mobile Robots
Kevin Doherty
2017
B.E. Thesis
Preprints
2022
-
Discrete-Continuous Smoothing and Mapping
Kevin Doherty, Ziqi Lu, Kurran Singh, and John J Leonard
arXiv preprint arXiv:2204.11936 2022
ICRA 2022 Workshop on Robotic Perception and Mapping: Emerging Techniques Spotlight Talk (2 selected of 48)
Refereed Conference and Journal Publications
2022
-
Spectral Measurement Sparsification for Pose-Graph SLAM
Kevin Doherty, David M. Rosen, and John J. Leonard
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2022
-
SLAM-Supported Self-Training for 6D Object Pose Estimation
Ziqi Lu, Yihao Zhang,
Kevin Doherty, Odin Severinsen, Ethan Yang, and John J. Leonard
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2022
-
Improving obstacle boundary representations in predictive occupancy mapping
Erik Pearson,
Kevin Doherty, and Brendan Englot
Robotics and Autonomous Systems 2022
-
2021
-
Advances in Inference and Representation for Simultaneous Localization and Mapping
David M Rosen,
Kevin Doherty, Antonio Terán Espinoza, and John J Leonard
Annual Review of Control, Robotics, and Autonomous Systems 2021
Invited article
-
Consensus-Informed Optimization Over Mixtures for Ambiguity-Aware Object SLAM
Ziqi Lu, Qiangqiang Huang,
Kevin Doherty, and John J. Leonard
In 2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2021
-
A Multi-Hypothesis Approach to Pose Ambiguity in Object-Based SLAM
Jiahui Fu, Qiangqiang Huang,
Kevin Doherty, Yue Wang, and John J. Leonard
In 2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2021
2020
-
Variational Filtering with Copula Models for SLAM
John D Martin*,
Kevin Doherty*, Caralyn Cyr, Brendan Englot, and John Leonard
In 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2020
*Equal contributors.
-
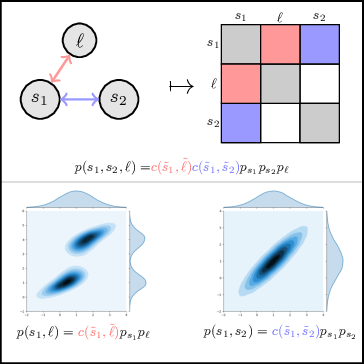
Probabilistic Data Association via Mixture Models for Robust Semantic SLAM
Kevin Doherty, David P Baxter*, Edward Schneeweiss*, and John J Leonard
In 2020 IEEE International Conference on Robotics and Automation (ICRA) 2020
*Equal contributors.
2019
-
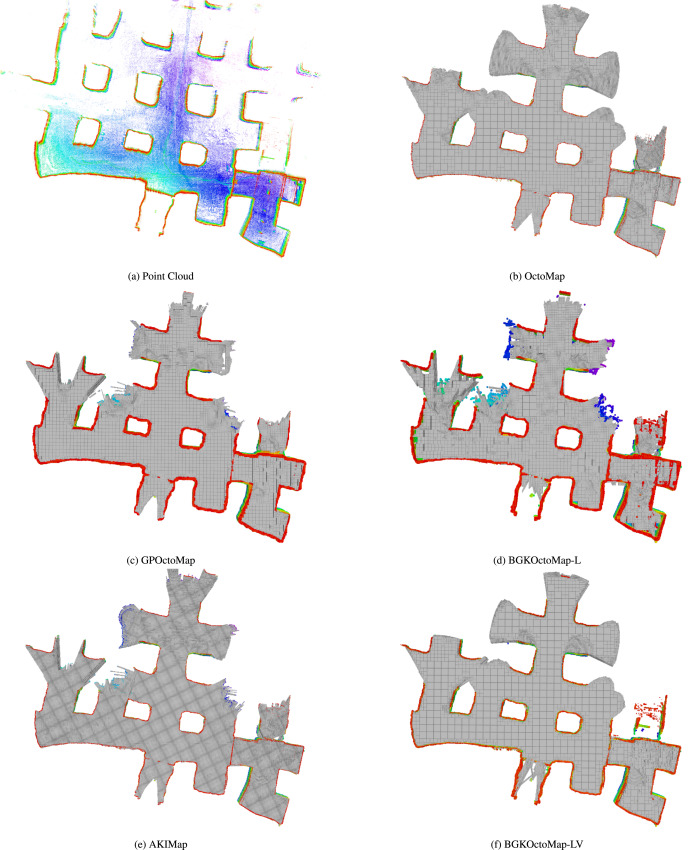
Learning-aided 3-D Occupancy Mapping with Bayesian Generalized Kernel Inference
Kevin Doherty, Tixiao Shan, Jinkun Wang, and Brendan Englot
IEEE Transactions on Robotics 2019
-
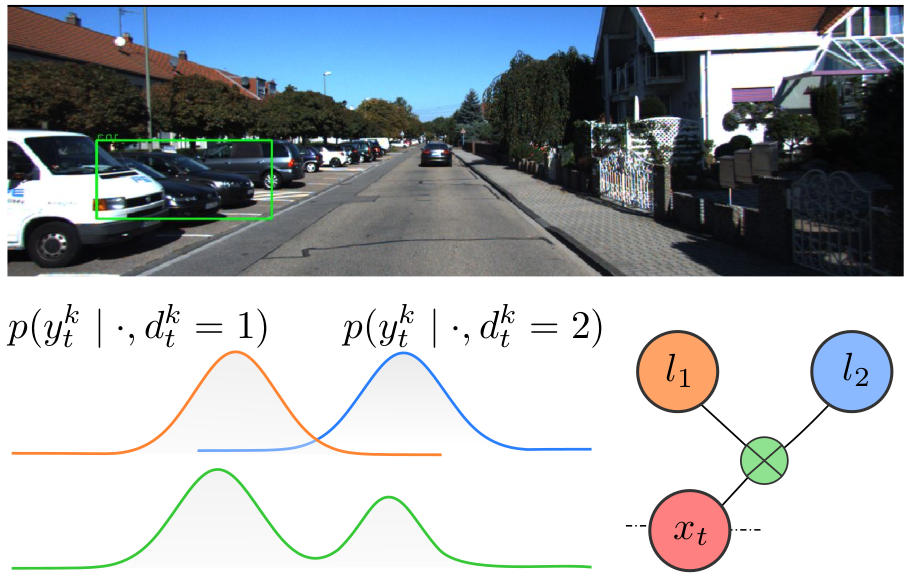
Multimodal Semantic SLAM with Probabilistic Data Association
Kevin Doherty, Dehann Fourie, and John Leonard
In 2019 International Conference on Robotics and Automation (ICRA) 2019
2018
-
Approximate Distributed Spatiotemporal Topic Models for Multi-Robot Terrain Characterization
Kevin Doherty, Genevieve Flaspohler, Nicholas Roy, and Yogesh Girdhar
In 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2018
Best Paper Award Finalist (6 finalists of 1,254 papers)
-
Bayesian Generalized Kernel Inference for Terrain Traversability Mapping
Tixiao Shan,
Kevin Doherty, Jinkun Wang, and Brendan Englot
In Conference on Robot Learning 2018
2017
-
Bayesian Generalized Kernel Inference for Occupancy Map Prediction
Kevin Doherty, Jinkun Wang, and Brendan Englot
In 2017 IEEE International Conference on Robotics and Automation (ICRA) 2017
2016
-
Probabilistic Map Fusion for Fast, Incremental Occupancy Mapping with 3D Hilbert Maps
Kevin Doherty, Jinkun Wang, and Brendan Englot
In 2016 IEEE International Conference on Robotics and Automation (ICRA) 2016
2015
-
Inference-enabled Information-theoretic Exploration of Continuous Action Spaces
Shi Bai, Jinkun Wang,
Kevin Doherty, and Brendan Englot
In International Symposium on Robotics Research (ISRR) 2015
In the News
-
Ruth and Paul Fye Award for Excellence in Oceanographic Research Best Paper Award, MIT-WHOI Joint Program, June 2020 < link >
-
“How Stevens Researchers are Creating Better Maps for Robots, Self-Driving Cars,” Stevens University News, June 2019. < link >
-
“Coding Curiosity,” MIT Graduate Program in Science Writing, May 2018. < link >
-
“Robot Explorers,” WHOI Multimedia, March 2018. < link >
-
“Engineering New Solutions,” Stevens University News, March 2017. < link >
-
“Robust Robotics for a Safer World,” Stevens University News, March 2017. < link >