How to Suppress Traffic Flow Instabilities
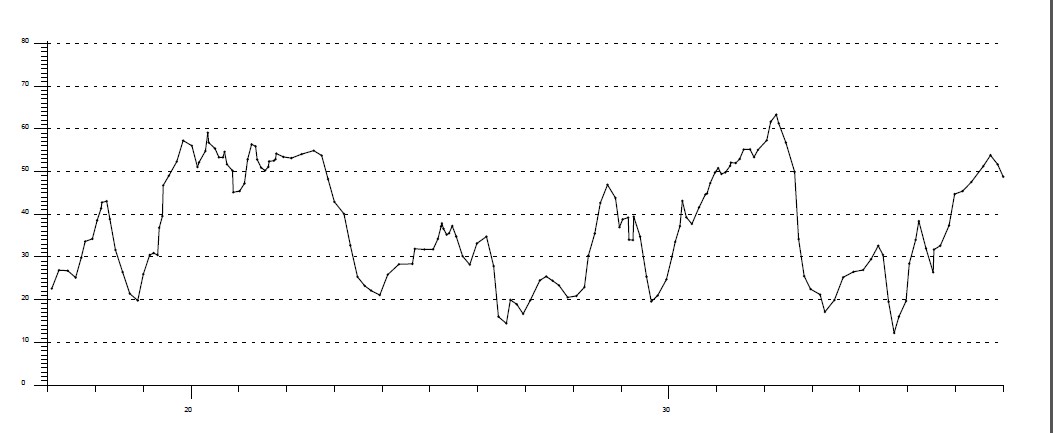
At high densities, traffic does not flow smoothly.
Unsmooth flow decreases throughput, increases stress and wastes energy.

Click on the following to see some sample records,
mostly collected on Interstate 93 going North from Boston:
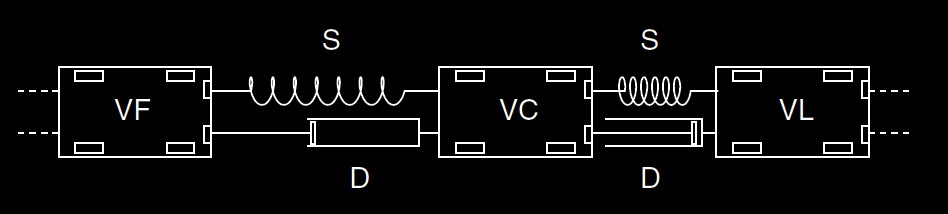
Flow instabilities are predicted by many models —
including “car following” models.
Interestingly, the otherwise sensible rule that, for safety reasons,
the separation between cars should be some multiple of the speed
(e.g. one car length per 10 mph), assures instability.
But more important here than explanations of why these instabilities
occur is whether — and how — they can be suppressed.
The answer is “yes” and the method is “bilateral
control.”
Click on the following for a set of slides with a brief explanation
of the problem and its solution:
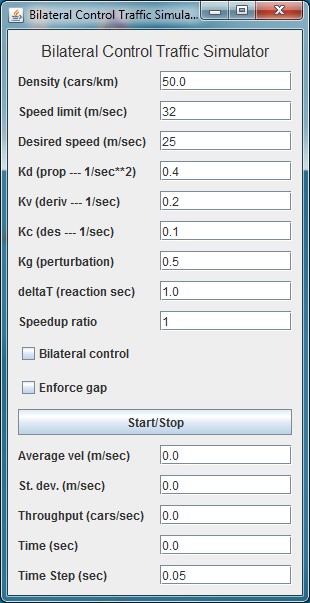
Downloadable java application for simulation of traffic flow
For a simple simulation
of the “car following” model and of “bilateral control”
click on the following:
Damping
Traffic Flow Instabilities Java Application
(this downloads the
TransportationVirtualPlatform_main.jar
file).
Java will start and you will get a control panel (*).
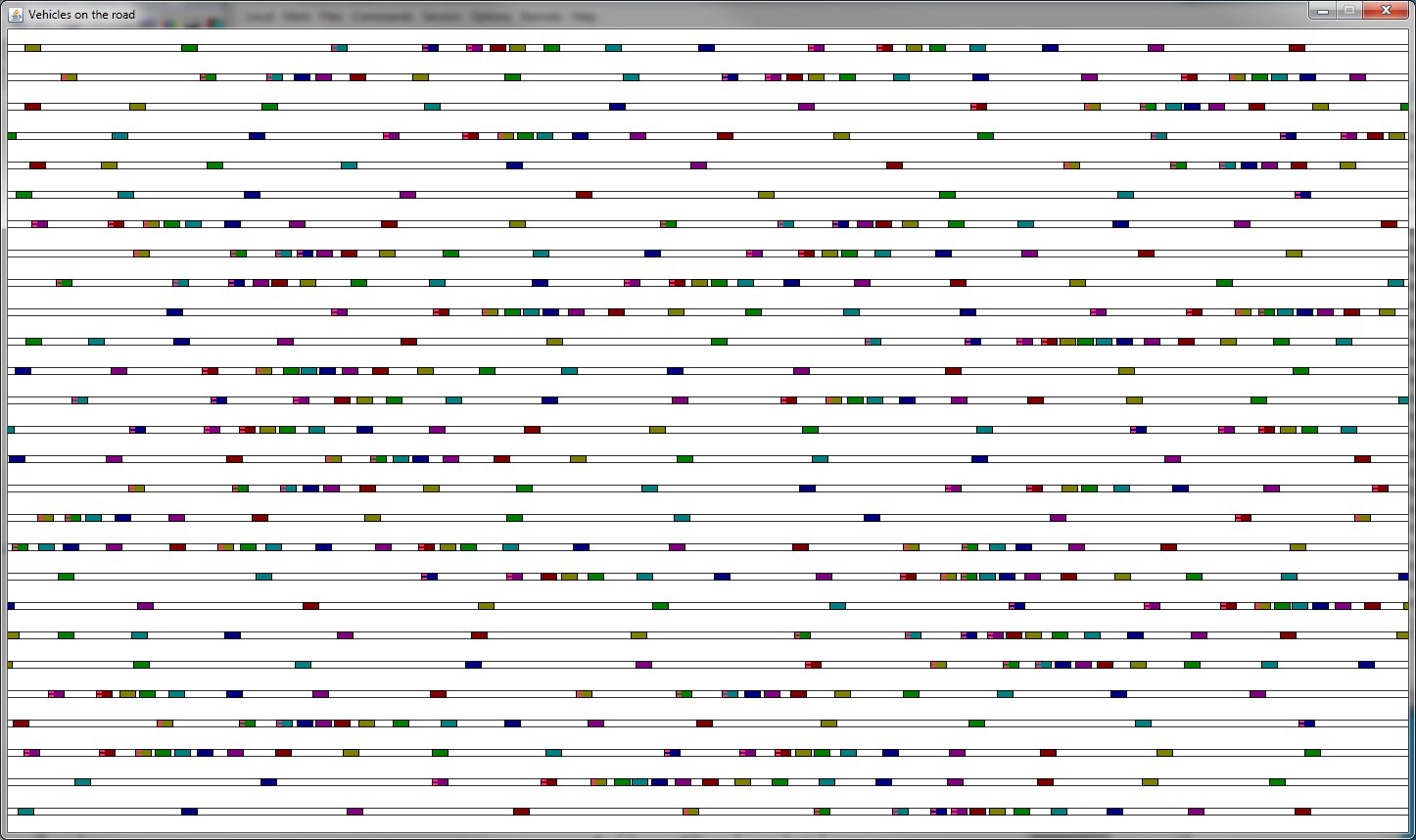
Click the “Start” button.
Observe the instabilities develop in the “car following panel”
with no instabilities in the “bilateral control” panel.
For an earlier version of the simulator, click on the control panel below
(this downloads the simulator file
Traffic.jnlp).
For additional details, see the papers:
B.K.P. Horn,
“Suppressing Traffic Flow Instabilities”
IEEE Intelligent Transportation Systems Conference (ITSC 2013)
Den Haag, Netherlands,
2013 October 6-9.
T. Baran, B.K.P. Horn,
“A Robust Signal-Flow Architecture For Cooperative Vehicle Density Control,”
Proceedings of the 38th International Conference on Acoustics, Speech, and
Signal Processing} (ICASSP 2013),
Vancouver, Canada,
2013 May 26-31.
Liang Wang, B.K.P. Horn, G. Strang,
“Eigenvalue and Eigenvector Analysis of Stability for a Line of
Traffic,”
Studies in Applied Mathematics,
2016 September.
B.K.P. Horn and Liang Wang,
“Wave Equation of Suppressed Traffic Flow Instabilities,”
IEEE Transactions on Intelligent Transportation Systems (ITS),
2017 December.
Liang Wang and B.K.P. Horn,
“Multi-Node Bilateral Control Model,”
IEEE Transactions on Automatic Control,
Vol. 64, No. 10, October 2019.
Liang Wang, Françoise Tisseur, Gilbert Strang and B.K.P. Horn,
“Stability analysis of a chain of non-identical vehicles under bilateral cruise control,”
School of Mathematics, University of Manchester,
2019.
Liang Wang and B.K.P. Horn,
“On the stability analysis of mixed traffic with vehicles under
car-following and bilateral control,”
IEEE Transactions on Automatic Control,
July 2020.
Liang Wang and B.K.P. Horn,
“On the Chain-Stability of Bilateral Control Model,”
IEEE Transactions on Automatic Control,
August 2020.
(*) To run the simulator you may have to add this web site to the Exception Site List.
In Windows, for example, go to the Control Panel, click on "Java", select "Security",
then click "Edit Site List" and add "http://people.csail.mit.edu/bkph/" to the list
(See video instructions,
thanks to Liang Wang).
Berthold K.P. Horn,
bkph@ai.mit.edu
Accessibility